Vor knapp 11 Jahren ist bei uns einer dieser Wärmepumpentrockner eingezogen. Das Gerät hat seitdem wirklich viel Wäsche gesehen, einen Haushalt mit dem täglichen Berg an Handtüchern, Bettzeug und Kinderkram trocknet so ein Ding nicht nebenbei. Über die ganze Zeit lief er eigentlich problemlos. Zwei Mal musste ich ihn zerlegen und reinigen, sonst nichts. Genau dieser Punkt ist es aber, der mich diesmal über eine Stunde und ein Teppichmesser gekostet hat.
Das Symptom ist immer das gleiche: Die Wäsche wird einfach nicht mehr richtig trocken. Teilweise musste ein Programm zwei bis drei Mal durchlaufen, bis das Zeug aus der Trommel wirklich trocken war. Für einen Trockner, der laut Datenblatt 232 kWh im Jahr ziehen soll, sind drei Durchläufe pro Ladung natürlich eine Katastrophe, energetisch wie zeitlich. Meine Frau hatte das Gerät zu dem Zeitpunkt schon angezählt. Es blieb also noch ein Versuch, dann fliegt es raus.
Warum ein Wärmepumpentrockner überhaupt zusetzt
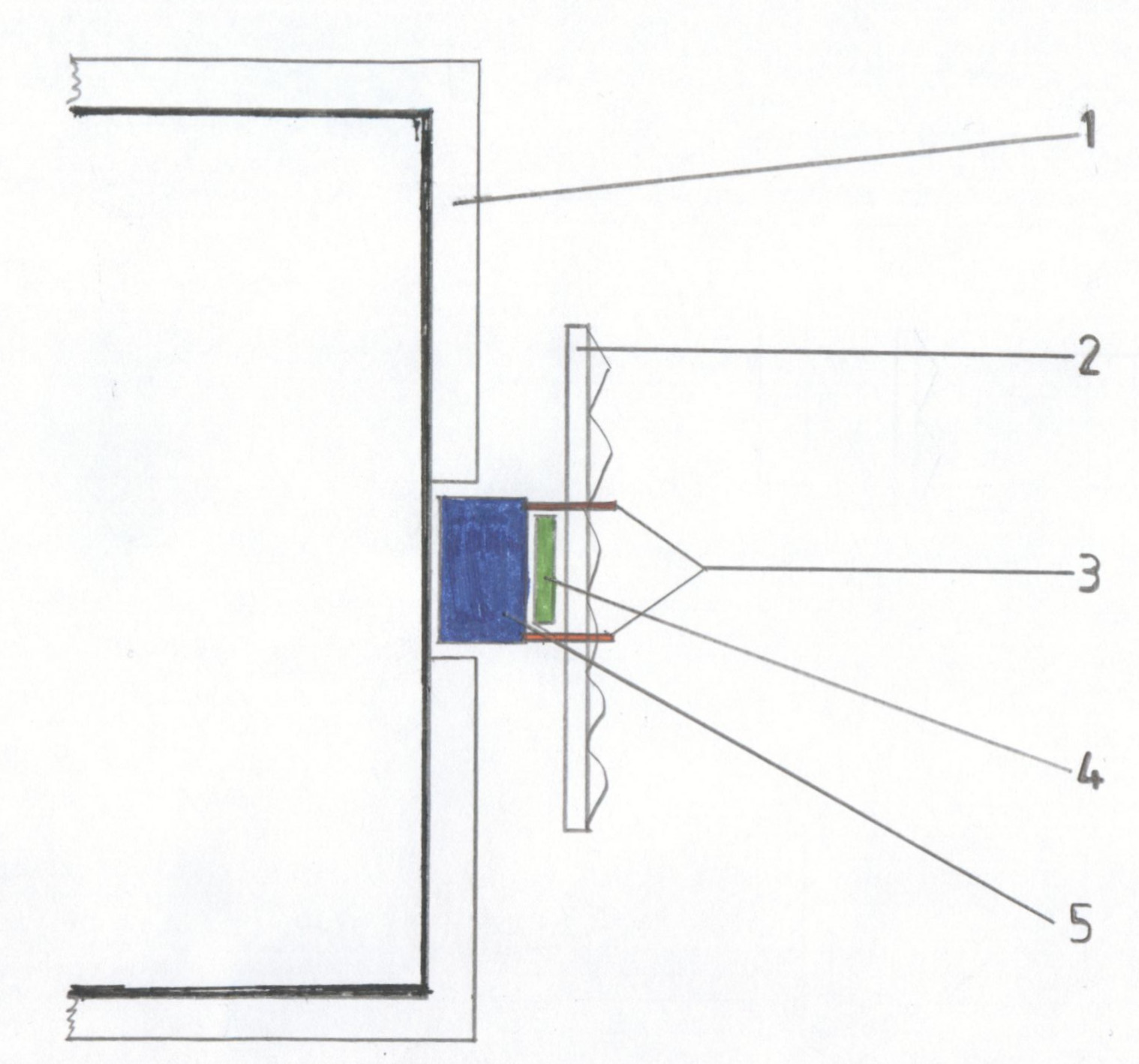
Ein Wärmepumpentrockner ist im Kern ein geschlossener Kreislauf. Die warme, feuchte Luft aus der Trommel wird an einem Verdampfer abgekühlt, das Wasser kondensiert und landet im Tank, dann wird die Luft an einem Kondensator wieder aufgeheizt und zurück in die Trommel geblasen. Dieser Wärmetauscher mit seinen eng stehenden Aluminiumlamellen ist das Herz des Geräts. Und genau dort lagern sich über die Jahre feinste Flusen ab, die das Sieb passieren. Setzt sich die Lamellenfläche zu, kommt kaum noch Luft durch, der Wärmeaustausch bricht ein, und die Wäsche bleibt klamm. Genau das beschreiben auch die einschlägigen Reparaturanleitungen: Flusen in den hinteren Kondensatorlamellen führen zu langen Laufzeiten und einer Wärmepumpe, die sich abmüht.
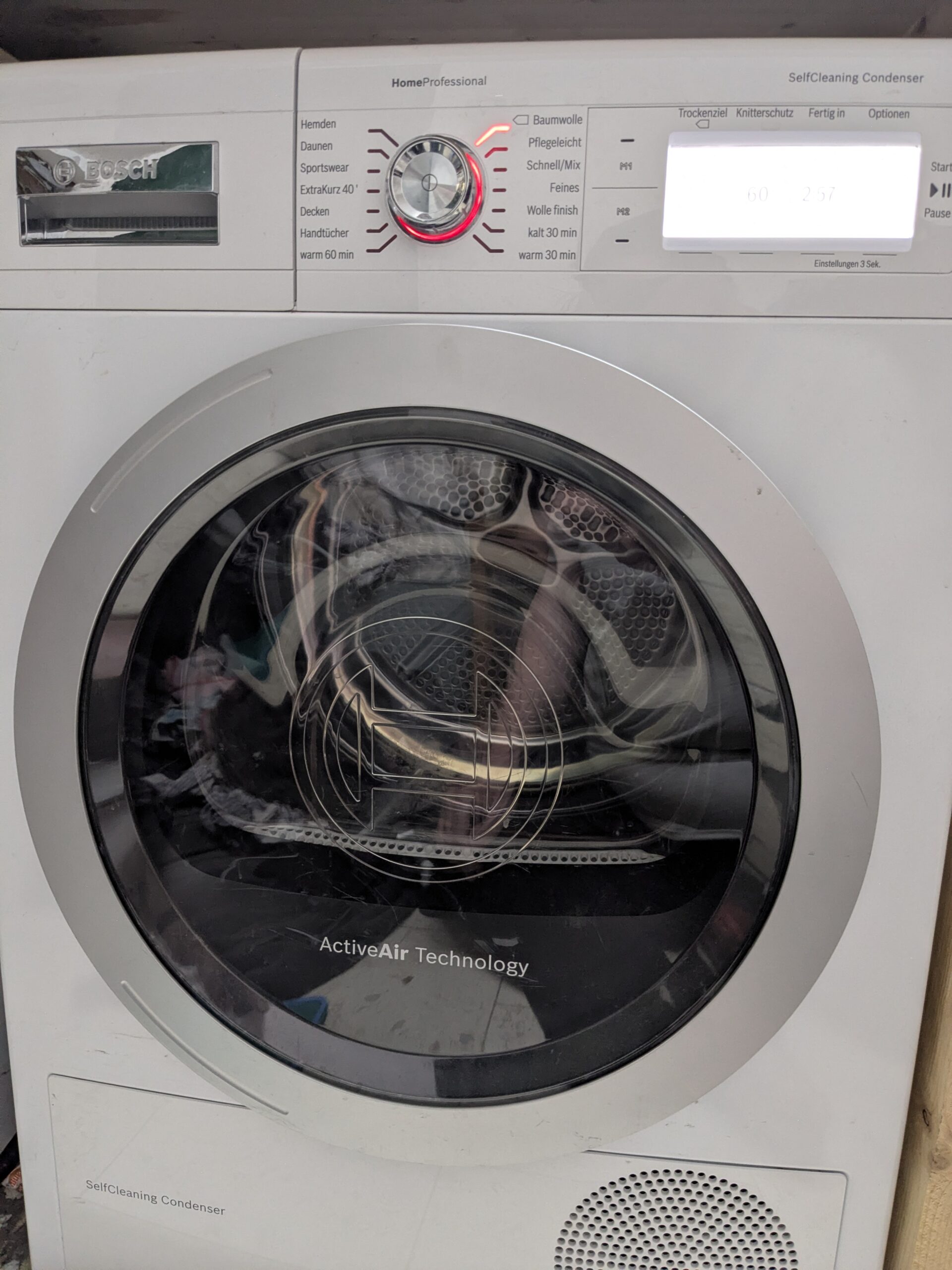
Die Ironie: ein SelfCleaning Condenser, der trotzdem dicht ist
Das Schöne an meinem Gerät: vorne prangt in großen Lettern SelfCleaning Condenser. Bosch wirbt damit, dass eine manuelle Reinigung des Kondensators nicht mehr nötig sei. Technisch steckt dahinter, dass während eines Trockengangs mehrfach Kondenswasser aus dem Prozess abgezweigt und über die Kondensatorfläche gespült wird, um Flusen wegzuschwemmen. Das funktioniert auch, aber eben nur an der vorderen, gut erreichbaren Fläche, die der Spülstrahl trifft. Die tieferen Lamellen und der Verdampfer dahinter bekommen davon nichts ab. Dort sammelt sich der Feinstaub über ein Jahrzehnt trotzdem an. „Selbstreinigend“ heißt hier also „die vordere Ebene bleibt frei“, nicht „der ganze Wärmetauscher bleibt sauber“. Nach knapp 11 Jahren ist der Unterschied dramatisch.
Hier die Eckdaten zum Gerät und zum Bauteil, um das sich gleich alles dreht:
| Gerät | Bosch WTY87701, Home Professional |
| Typ / FD | WDT66, FD 9505 |
| Bauart | Wärmepumpentrockner, 8 kg, A++, ActiveAir Technology, SelfCleaning Condenser |
| Service-Klappe (Teilenummer) | BSH 00646776, ca. 225 x 145 mm, mit Dichtung und 6 Schrauben |
| Klappe passt laut Teilekatalog auf | Bosch Serie 6 / Serie 8 / Maxx 7, Siemens iQ300 bis iQ800 |

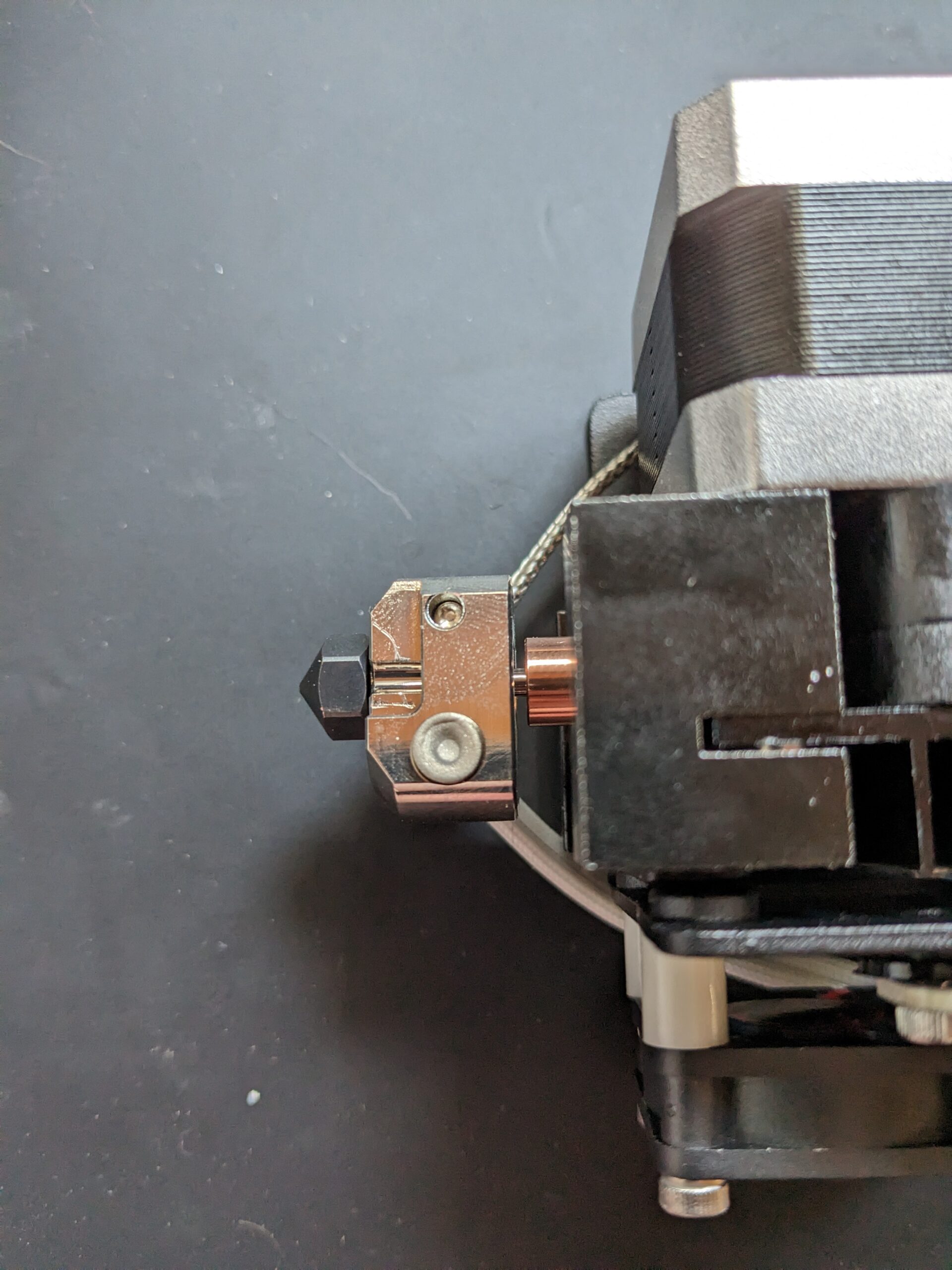
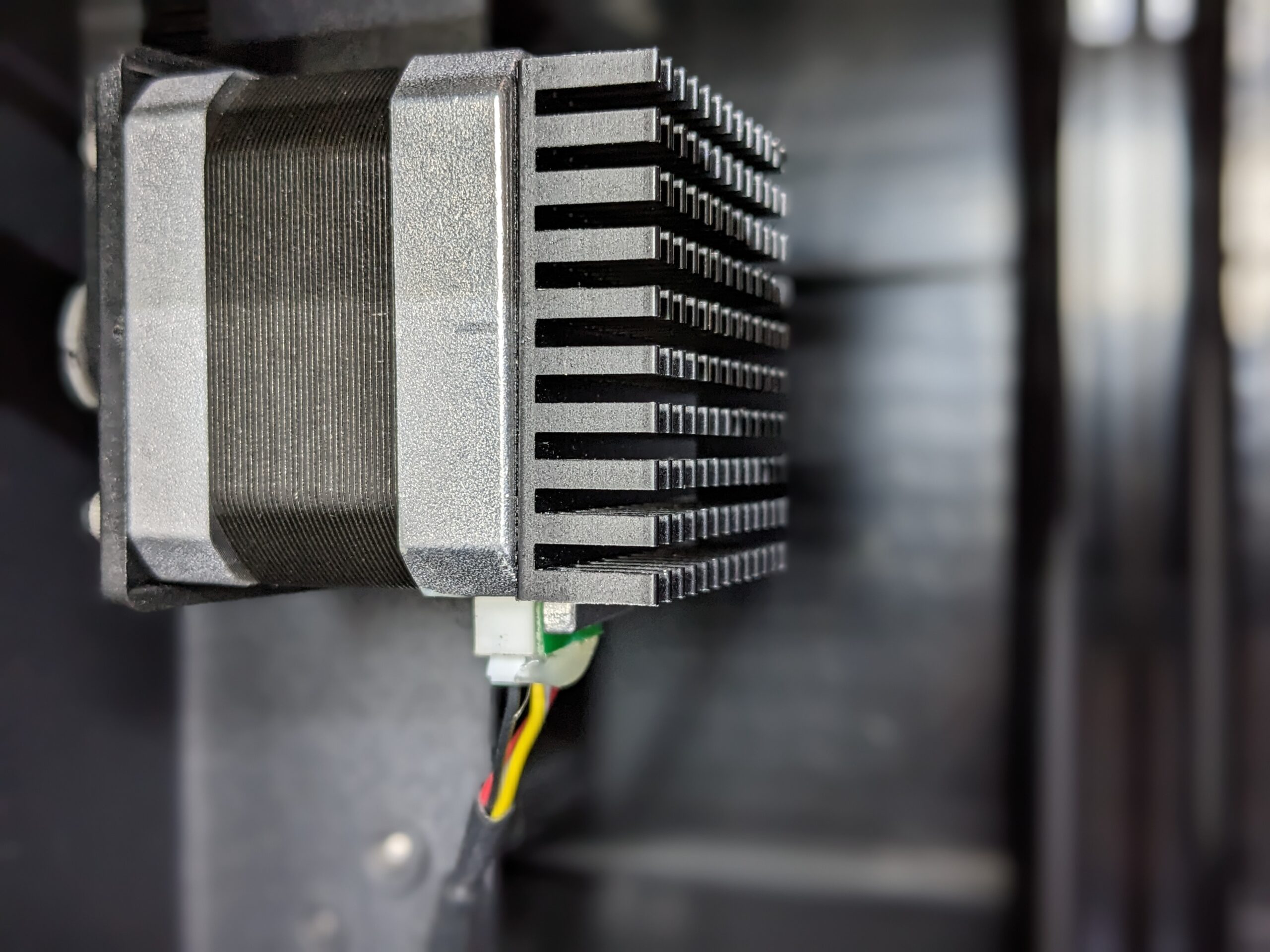
Wo man rankommt, und wo eben nicht
Das große Flusensieb innen vor der Trommel ist schnell raus, da bekommt man mit schmalen Fingern auch etwas heraus, aber an die spannenden Stellen kommt man so nicht. Vorne am Gerät gibt es noch eine kleine Abdeckung. Rechts dahinter sitzt ein Lüfter, links sieht es zumindest so aus, als hätte dort mal jemand über eine Art Klappe nachgedacht. Und zwar genau an der Stelle, an der man eine Klappe bräuchte, wenn man den Kondensator selbst reinigen will. Bei meinen letzten beiden Reinigungen konnte ich alles andere öffnen und sauber machen, aber an den Kondensator selbst kam ich nie richtig heran. Diesmal sollte es anders laufen.
Die Klappe, die Bosch vergessen hat einzubauen
Jetzt kommt der Teil, der mich erst gewundert und dann geärgert hat. Die Stelle, an der ich die Klappe erwartet hätte, ist im Gehäuse fast schon vorperforiert. Die Kontur ist angedeutet, das Material an der Linie spürbar dünner. Mit einem Teppichmesser lässt sich die Öffnung sehr einfach herstellen, man folgt einfach der angedachten Linie. Heißt im Klartext: Bosch hat die Service-Öffnung konstruktiv komplett vorgesehen, das Werkzeug für die Stanzung existiert, die Position stimmt, nur ausgeliefert wird das Gerät mit zugemachter Wand und ohne Klappe. Für genau diese Lücke gibt es sogar eine eigene Ersatzteilnummer, die 00646776, und einen ganzen Zubehörmarkt. Right to Repair sieht anders aus.

Was dann hinter der frisch geschnittenen Öffnung zum Vorschein kam, war wirklich ekelig. Die Flusen hingen als kompakter, grauer Filz komplett vor den Kühlrippen und haben den Wärmetauscher zu einem großen Teil verdeckt. So kann der Kondensator natürlich nicht mehr arbeiten, da geht schlicht keine Luft mehr durch.

Alles vorsichtig herausgeholt, abgesaugt und feucht nachgewischt. Die Lamellen waren an einigen Stellen verbogen, die habe ich anschließend so gut wie möglich wieder begradigt. Danach sah der Wärmetauscher wieder so aus, wie er soll: blankes Aluminium, freie Kanäle, Luft kann wieder hindurch.

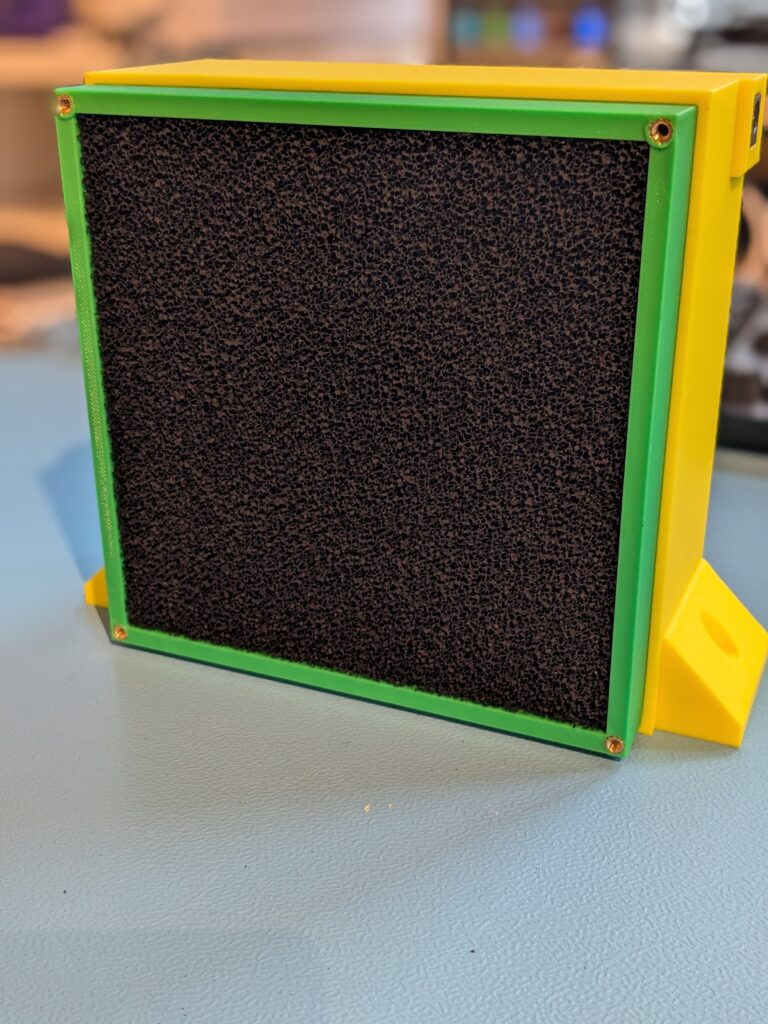
Variante 1: die Klappe selbst drucken
Bleibt die Frage, wie man das Loch wieder sauber und vor allem dicht verschließt. Ein offenes Gehäuse zieht Falschluft und stört den Kreislauf. Ich habe eine wirklich erstklassige Druckdatei für meinen Bambu Lab X1-Carbon gefunden, ein Nachbau genau der BSH-Klappe 00646776: BSH 00646776 Condenser Door Service Panel auf MakerWorld.
Gedruckt habe ich die Abdeckung in grünem ABS und die Dichtung in TPU 95A. PLA wäre bei den Temperaturen rund um Kondensator und Wärmepumpe keine gute Idee. PLA fängt schon bei etwa 60 Grad an weich zu werden, sein Glasübergang liegt genau in dem Bereich, den so eine Baugruppe im Dauerbetrieb durchaus erreicht. Das Teil würde sich auf Dauer verziehen und die Dichtfläche verlieren. ABS liegt mit einem Glasübergang um die 105 Grad deutlich darüber und steckt die Wärme locker weg. Für die Dichtung will man dagegen etwas Flexibles, das die Spaltmaße ausgleicht und sauber abdichtet, deshalb das weiche TPU mit Shore 95A. Die Materialkombination ist hier kein Gimmick, sondern genau richtig gewählt.
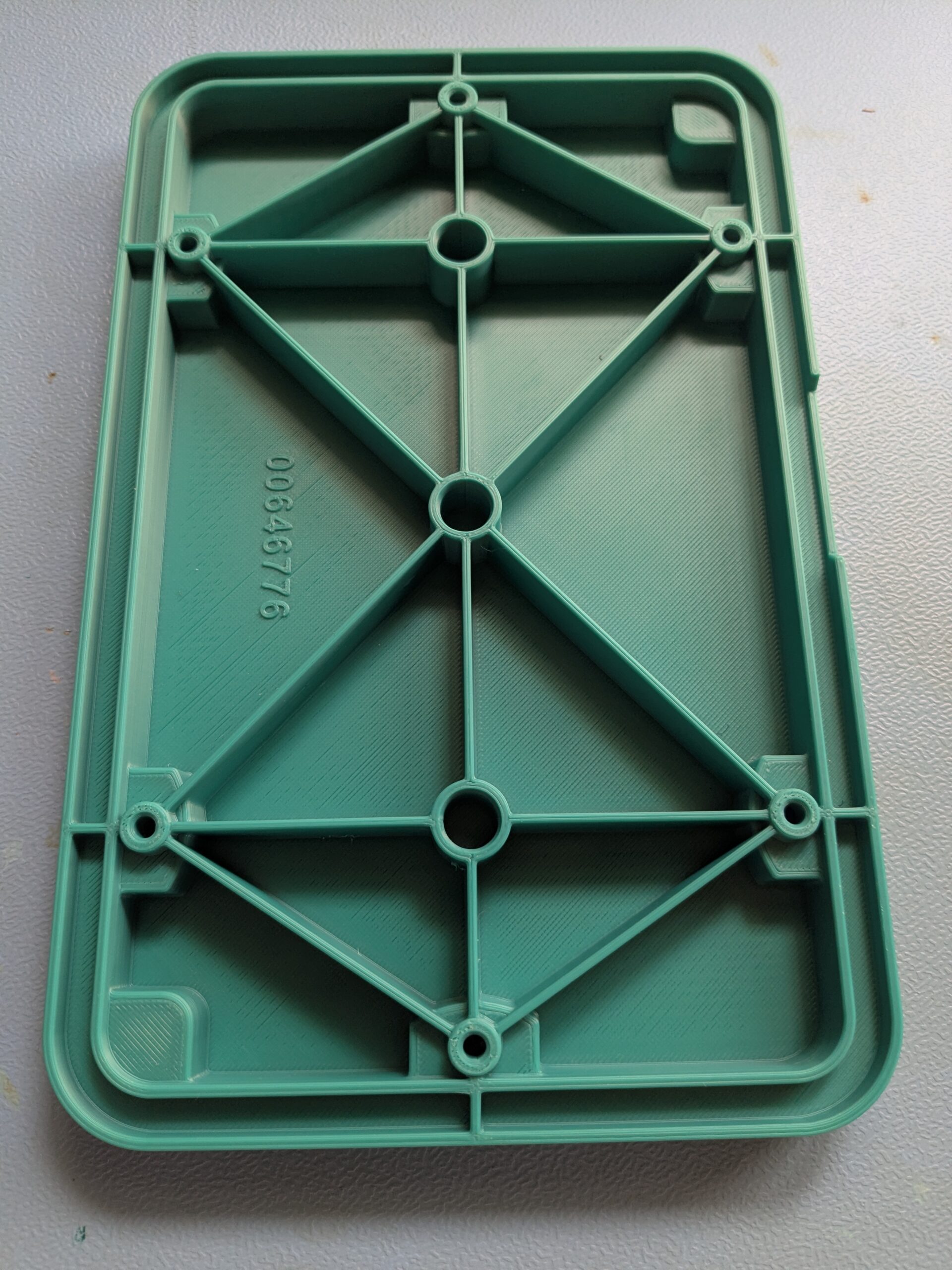
Die Versteifungsrippen auf der Rückseite und die eingeprägte Teilenummer zeigen, wie sauber die Datei gemacht ist. Mit aufgelegter TPU-Dichtung sieht das dann so aus:

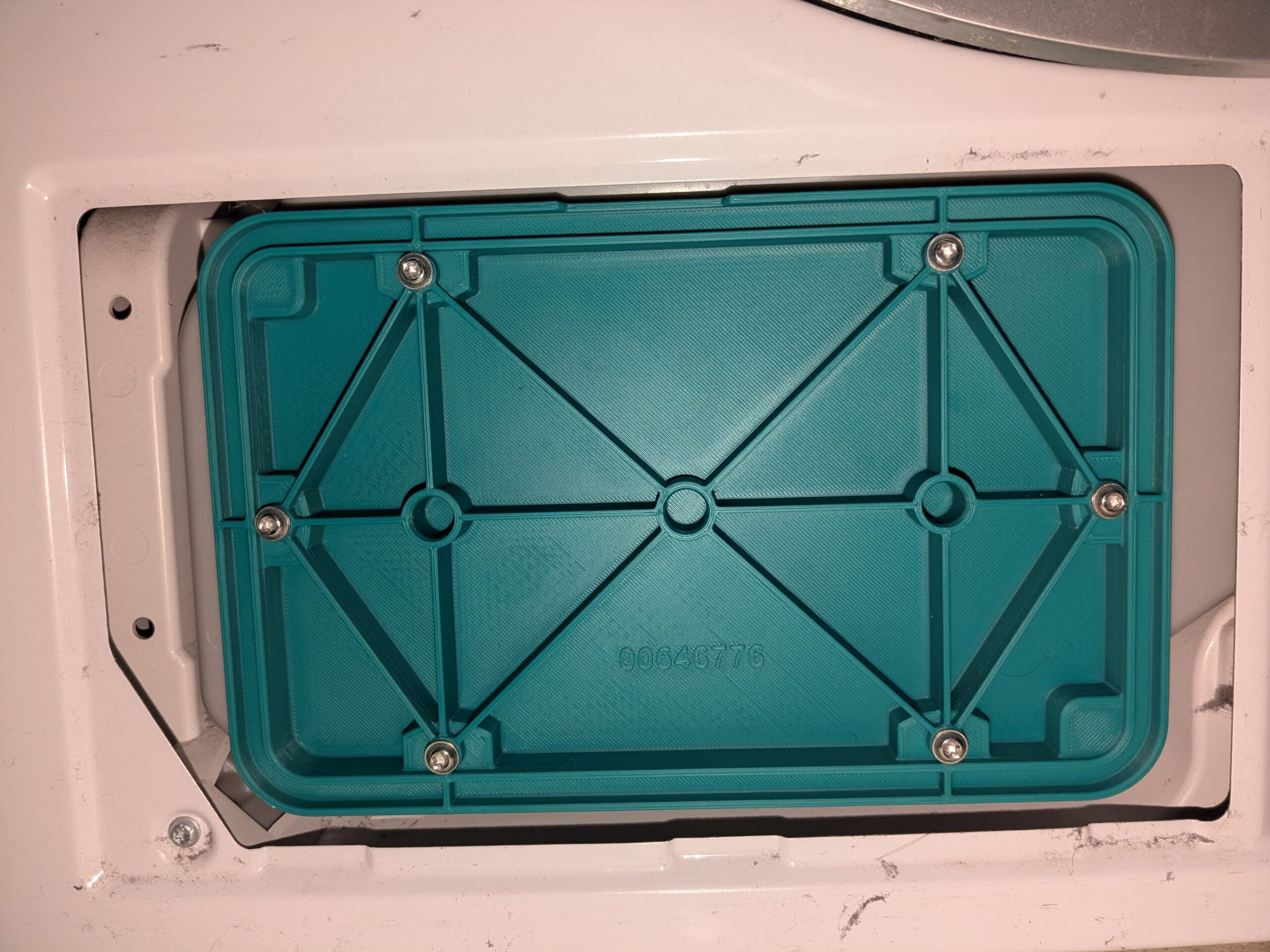
Montiert wird mit sechs Schrauben in die vorhandenen Dome rund um die Öffnung. Die selbst gedruckte Abdeckung passt erstklassig und dichtet alles ab, wie man es sich wünscht.
Variante 2: die fertige Klappe kaufen
Wer keinen 3D-Drucker hat, muss trotzdem nicht zum teuren Originalersatzteil greifen. Ich habe auf Amazon für knapp 15 Euro eine passende Abdeckung gefunden: Wartungsklappe für den Wärmetauscher. Die kommt aus spritzgegossenem, talkgefülltem Polypropylen (auf dem Bauteil steht die Materialkennung PP-TV30) und liegt damit thermisch ebenfalls im grünen Bereich. Im Set sind noch etwas Werkzeug zum Reinigen und sogar ein kleines Tool, mit dem sich die Kühlrippen wieder begradigen lassen.

Auch diese fertige Klappe sitzt sauber in der Öffnung und schließt bündig ab. Auf dem Bauteil sind Teilenummer und Materialkennung mit eingegossen.

Beide Lösungen, die selbst gedruckte und die gekaufte, passen perfekt und dichten zuverlässig ab. Ich kann beide vorbehaltlos empfehlen. Wer einen Drucker mit ABS-tauglichem Gehäuse hat, druckt sich die Klappe für ein paar Cent Material selbst, alle anderen sind mit der 15-Euro-Variante inklusive Reinigungswerkzeug bestens bedient.
Und jetzt?
Der Trockner läuft wieder wie am ersten Tag. Eine Ladung, ein Durchlauf, Wäsche trocken. Auf den Fotos vom verdreckten Kondensator sieht es übrigens schlimmer aus, als es sich am Ende angefühlt hat, in einer guten Stunde war alles erledigt. Schöner Nebeneffekt: Ab jetzt brauche ich kein Teppichmesser mehr, sondern schraube die Klappe einmal im Jahr auf und sauge kurz durch. Vielleicht laufen so ja noch einmal 11 Jahre aus dem Teil heraus.
Die kleine Moral: Lasst euch von einem „SelfCleaning“-Aufkleber nicht einlullen. Selbst die selbstreinigenden Geräte setzen sich über die Jahre zu, und ein bisschen Wartung verlängert die Lebensdauer enorm. Dass man dafür erst eine Klappe ins Gehäuse schneiden muss, die der Hersteller komplett vorbereitet, aber nicht freigibt, ist ein eigenes kleines Trauerspiel. Gut, dass es findige Leute mit Druckdateien und Ersatzteilen gibt.
Siehe auch:
Habt ihr auch so ein Gerät, bei dem die Service-Klappe ab Werk fehlt, oder eine eigene Druckdatei dafür? Dann lasst es mich gerne wissen, ihr dürft mich jederzeit fragen.