Anfang März habe ich hier beschrieben, wie ich den NEXT Biometrics NB-2020-U in meinem Fujitsu Notebook unter Linux zum Laufen gebracht habe. Die ganze Arbeit lief am Ende auf eine einzige Product ID hinaus: 0x2020 im bestehenden nb1010 Treiber, weil der NB-2020-U denselben Sensor Die wie der NB-1010-U nutzt. Der Beitrag endete mit dem üblichen Cliffhanger: Merge Request eingereicht, CI grün, warten auf das Review durch die Maintainer.
Marco Trevisan, einer der libfprint Maintainer, hat den Patch auf den aktuellen master rebased, die Pipeline noch einmal durchlaufen lassen und ihn am 2. Juli 2026 per Auto-Merge aufgenommen (Commit 0fa670f). Blockierende Review-Kommentare gab es keine. Der Patch war klein und die Beweislage eindeutig: gleicher Sensor, gleiches USB Protokoll, gleicher Treiber, nur eine zusätzliche ID in der Tabelle.
Was das für Betroffene heißt
Für alle mit demselben Fingerabdruckleser im Notebook: Ab der nächsten libfprint Version wird der NB-2020-U out of the box erkannt. Kein eigener Patch mehr, kein Selberbauen. Enrollment und Verifikation über fprintd laufen dann direkt, sobald die Distribution die neue libfprint Version ausliefert. Wer nicht warten möchte, nimmt weiterhin den Patch aus dem ersten Beitrag oder baut direkt vom aktuellen master.
Der zweite Leser aus derselben Familie, der NB-2033-U mit seinem komplett eigenen Protokoll, hat einen eigenen Treiber von Grund auf bekommen. Dieser Merge Request !574 liegt noch beim Review, ist aber frisch auf den neuen master rebased und die Pipeline ist grün. Sobald auch der durch ist, folgt ein weiterer kurzer Nachtrag.
Eigentlich wollte ich nur etwas ganz Simples: Aufnahmen von meinem alten DOS-Rechner machen. BIOS-POST, der Speichertest, ein paar DOS-Spiele, einmal das alles sauber als Video festgehalten. Dafür landete ein „VGA to USB 3.0 HD 1080P Video Capture Card“ in meinem Warenkorb, so ein billiger Dongle für ein paar Euro. Spoiler: in genau der Form hat das nicht geklappt. Und warum es nicht klappt, ist die eigentlich spannende Geschichte. Es geht um einen 8051 mit recyceltem Mask-ROM, eine EDID die der Quelle einen Monitor vorlügt, ein „1080p“ das horizontal gar keins ist, und eine Strings-Modifikation die ich bis heute nicht überlistet habe.
Das konkrete Gerät, falls es jemand nachvollziehen will, gibt es bei Amazon unter diesem Link. Es ist einer von hunderten optisch identischen Sticks, die alle den gleichen MacroSilicon-Chipsatz tragen. Die Erkenntnisse hier gelten also für eine ganze Geräteklasse, nicht nur dieses eine Exemplar.
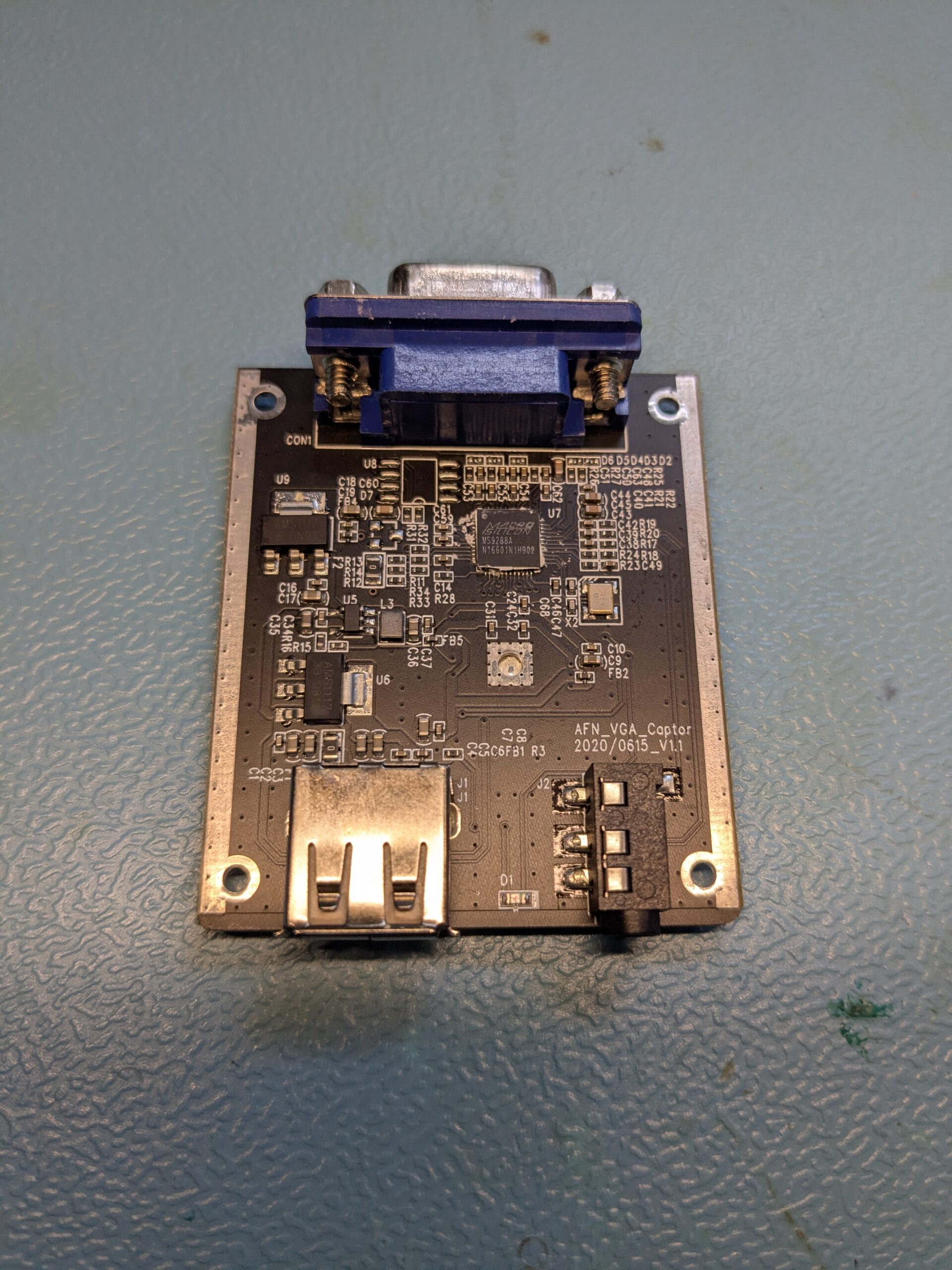
Die Platine des Sticks: VGA-Stecker, USB-A, 3-poliger Audio-Header und der Silkscreen AFN_VGA_Captor 2020/0615_V1.1.
Was steckt auf der Platine?
Aufgeschraubt zeigt sich eine winzige Platine mit Silkscreen-Aufdruck AFN_VGA_Captor 2020/0615_V1.1, einem VGA-Stecker, einer USB-A-Buchse und einem 3-poligen Audio-Header. Drei Halbleiter machen die eigentliche Arbeit:
Ref
Chip
Funktion
U3
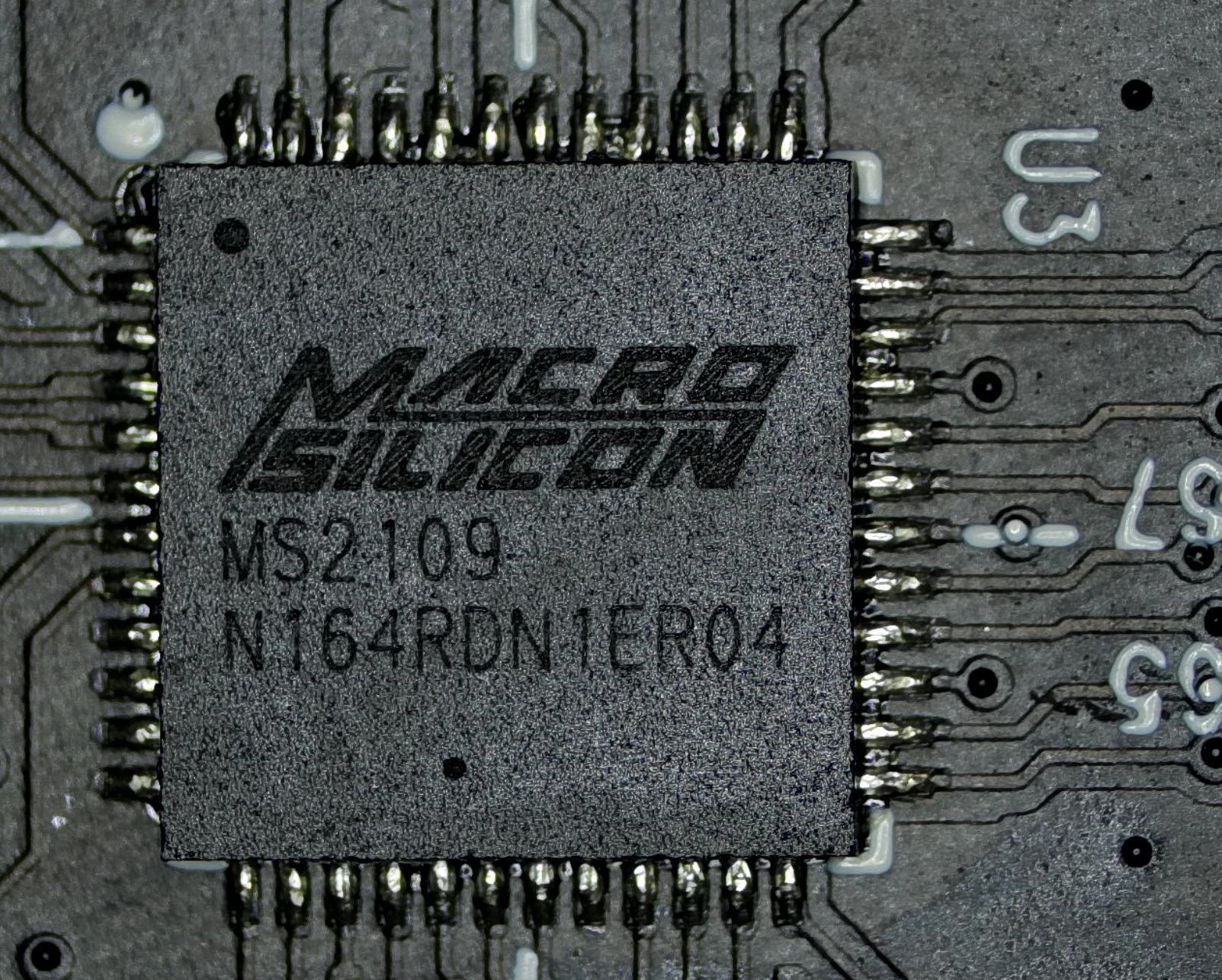
MacroSilicon MS2109
8051-basierte UVC-Bridge, USB 2.0 High-Speed
U7
MacroSilicon MS9288A
Analoger VGA-Empfänger (PLL plus ADC plus Scaler)
U2
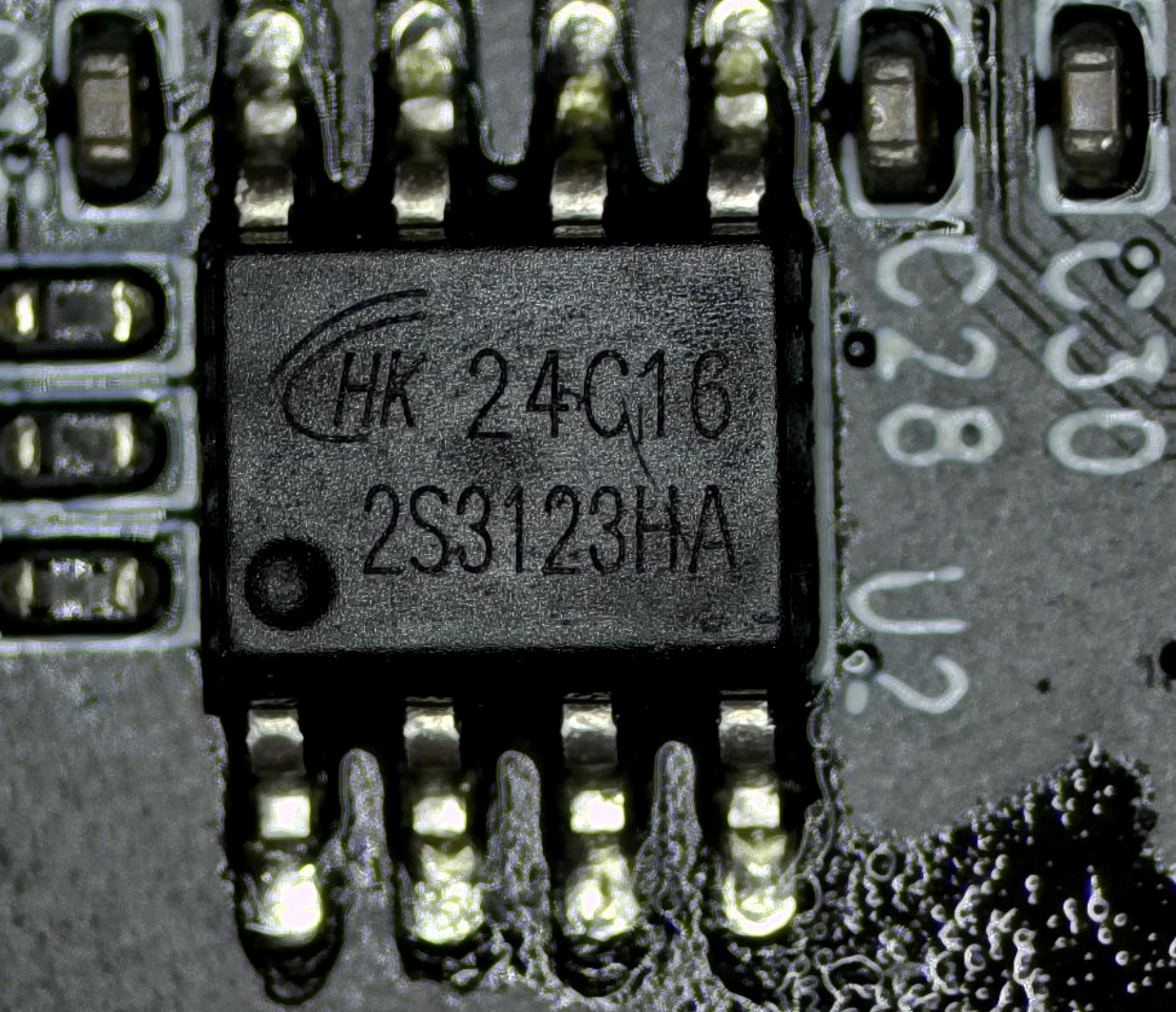
HK / Holtek 24C16
I²C-EEPROM, 2 KiB
Der MS2109 ist berühmt-berüchtigt. Er steckt in den meisten der spottbilligen HDMI-Capture-Sticks, die seit Jahren durchs Netz geistern. Hier sitzt derselbe Chip in einer VGA-Variante, mit dem MS9288A als analogem Frontend davor. Wie eng die beiden Welten verwandt sind, wird sich beim Mask-ROM-Dump zeigen: die Firmware ist nachweislich aus der HDMI-Variante recycelt.
U3, der MacroSilicon MS2109. Der gleiche 8051-Chip wie in den billigen HDMI-Capture-Sticks, hier in der VGA-Variante.
U7, der MacroSilicon MS9288A. Analoges Frontend mit PLL, ADC und Scaler, lockt das VGA-Signal und digitalisiert es.
U2, der HK 24C16. 2 KiB I2C-EEPROM, hier liegen EDID, Vendor-Strings und die beiden 8051-Patch-Blöcke.
Wie meldet sich das Ding am USB?
Beim Anstecken kommt der erste Hinweis darauf, dass die Verpackung schwindelt. „USB 3.0″ steht drauf, der Kernel sieht aber ein High-Speed-Gerät, also USB 2.0:
usb 1-1.1: new high-speed USB device number 15 using xhci_hcd
usb 1-1.1: New USB device found, idVendor=534d, idProduct=2109, bcdDevice=21.00
usb 1-1.1: Manufacturer: MACROSILICON
usb 1-1.1: Found UVC 1.00 device <unnamed> (534d:2109)
hid-generic 0003:534D:2109.0009: hiddev4,hidraw8: USB HID v1.10 Device
Vendor 0x534d ist MacroSilicon, Produkt 0x2109 der nackte MS2109. Das Gerät enumeriert als UVC-1.00-Kamera plus USB-Audio plus ein vendor-spezifisches HID-Interface. Genau dieses HID-Interface ist später der Schlüssel: darüber kommt man an das EEPROM und sogar an den Arbeitsspeicher des 8051 heran, ganz ohne Lötkolben am I²C-Bus.
Das Werkzeug: ms-tools
Die zentrale Referenz für alles, was mit MS2109 zu tun hat, ist das Projekt ms-tools von Bertold Van den Bergh. Das ist eine kleine Goldgrube: EEPROM lesen und schreiben über die HID-Schnittstelle, Live-Zugriff auf den XDATA-Speicher zur Laufzeit (per eingeschleustem 8051-Patch-Code), das Werkzeug mshack zum Injizieren eigener 8051-Routinen, Ghidra-Skripte mit teildisassemblierter Firmware und ein dump-rom, das den kompletten 64-KiB-Mask-ROM ausliest.
Auf Ubuntu 24.04 ist das schnell gebaut:
sudo apt install golang-go libhidapi-dev libudev-dev
git clone https://github.com/BertoldVdb/ms-tools.git
cd ms-tools/cli && go build -o ../msctl .
Der EEPROM-Dump und eine erste Korrektur
Manche MS2109-Revisionen mögen das übliche RAM-Patching nicht, das ms-tools für komfortable Zugriffe nutzt. Mit --no-patch liest der Dump trotzdem sauber, weil dann der rohe HID-Pfad ohne vorgeschaltete Firmware-Manipulation genommen wird:
Das 0e vor jedem String ist die Pascal-Längenangabe (14 Zeichen). Ab 0x30 beginnt der erste 8051-Patch-Block. Spannend ist die EDID-Sektion ab 0x07A. Mein erster Analyse-Versuch ging davon aus, der klassische EDID-Header 00 FF FF FF FF FF FF 00 sei wegoptimiert und werde erst zur Laufzeit ergänzt. Das war falsch. Nach dem Mask-ROM-Dump und einem genaueren Blick steht der Header sauber im EEPROM. Solche Korrektur-Momente sind mir lieber als ein zu glattes Narrativ, also schreibe ich sie hier auch hin.
Die EDID selbst enthält einen Monitor-Namen MACROSILICON (EDID-Descriptor mit Tag 0xFC), als erstes Detailed-Timing 1280×720 bei 60 Hz mit 74,25 MHz Pixeltakt, ein zweites Timing 1280×768, dazu eine CTA-861-Extension mit nativem VIC=4 (720p60) plus VICs für 1080p60, 1080i, 720p50, 480p und 576p. Es gibt sogar einen HDMI-VSDB-Block mit dem OUI 00:0C:03 von HDMI Licensing und einer Source Physical Address. Eine VGA-only-Platine, die HDMI-Strukturen in ihrer EDID trägt. Das ist schon der erste deutliche Fingerabdruck der gemeinsamen Codebasis.
Der Mask-ROM verrät die Herkunft
Der eigentliche Programmcode des 8051 liegt in einem nicht beschreibbaren Mask-ROM. dump-rom lädt dafür eigenen 8051-Code in den USERRAM, der per MOVC den ROM ausliest und über HID zurückschiebt:
64 KiB komplette CODE-Memory, davon rund 36 KiB belegt im Bereich 0x0000 bis 0x8FFF und weitere 12 KiB ab 0xC000. Die Highlights:
0x7738: eine zweite, im ROM fest verdrahtete Default-EDID, intakt mit Standard-Header, Hersteller-ID „HJW“ und Monitor-Name „HDMI TO USB“. Das ist der Beweis: diese Firmware wurde ursprünglich für den HDMI-Bruder geschrieben.
0x77A9: der ASCII-String „HDMI TO USB“ noch einmal direkt.
0x7087 und 0x709B: die USB-String-Descriptor-Fallbacks „USB Video“ und „USB Digital Audio“ in UTF-16LE. Diese beiden werden uns gleich noch ärgern.
0x0000: der Reset-Vector 02 41 49, also LJMP 0x4149.
Ein LCALL 0xCC10 bei ROM-Adresse 0x478F: das ist der zentrale Einstieg vom Mask-ROM in den EEPROM-Patch-Code, der zur Laufzeit in den RAM kopiert wurde.
Der Bootloader kopiert dabei die EEPROM-Bytes ab Offset 0x30 in den USERRAM ab Adresse 0xCBD0. Die Strings-Sektion 0x10 bis 0x2F wird explizit nicht mitkopiert. Die Patch-Firmware liest die Strings stattdessen zur Laufzeit direkt per I²C aus dem EEPROM und baut daraus die USB-String-Descriptoren an festen RAM-Adressen zusammen. Diese Mapping-Tabelle ist der Kern, um den herum sich die ganze Bastelei dreht:
EEPROM
Code-RAM
Was
0x030
0xCC00
Patch #1, kleine Hook-Routinen
0x07A
0xCC4A
EDID-Header 00 FF FF FF FF FF FF 00
0x080
0xCC50
EDID-Body
0x0FA
0xCCCA
CTA-861-Extension
0x17A
0xCD4A
Patch #2, C51-Startup
0x180
0xCD50
MOV SP,#0x3B; LJMP 0xCD91
0x1C1
0xCD91
main() der Patch-Firmware
Erkenntnis 1: Die EDID lügt der Quelle einen Monitor vor
Über die DDC-Leitungen am VGA-Stecker (Pins 12 und 15) präsentiert der Dongle dem Quell-PC eine EDID. Damit gibt sich das Gerät als Monitor namens „MACROSILICON“ mit 720p60 als nativer Auflösung aus. Genau deshalb liefert ein Quell-PC, an dem gar kein echter Monitor hängt, trotzdem ein sinnvolles Bild: er glaubt, ein 720p-Display gefunden zu haben. So weit, so clever.
Erkenntnis 2: Das „1080p“ ist Marketing
Die UVC-Frame-Tabelle im Mask-ROM listet zwar brav 1920×1080 mit 30 fps als MJPEG. Die Realität sieht anders aus. Mit v4l2-ctl lässt sich die Format-Liste auslesen:
Unkomprimiertes YUYV bei 1080p ist auf magere 5 fps gedeckelt. Das native Detailed-Timing der EDID ist 720p60, das 1080p wird intern hochskaliert. Und USB 3.0 ist nirgends, der Chip kann nur High-Speed. Drei Behauptungen auf der Verpackung, drei mal geschummelt. Auf die 5-fps-Grenze komme ich am Ende noch genauer zurück, die hat einen sehr konkreten technischen Grund.
Erkenntnis 3: Kein DOS, und das lässt sich nicht reparieren
Jetzt zum eigentlichen Frustpunkt, der Grund, warum mein DOS-Plan scheiterte. Die UVC-Frame-Tabelle enthält keine 70-Hz-Modi. Ein DOS-BIOS gibt aber im Standard-VGA-Textmodus 720×400 bei 70 Hz aus. Das analoge Frontend, der MS9288A, könnte dieses Signal vermutlich locken, der Horizontaltakt von 31,469 kHz ist derselbe wie bei 640×480 bei 60 Hz. Aber die MS2109-Firmware bietet schlicht keinen passenden UVC-Frame-Mode an, an dem ein Aufnahmeprogramm andocken könnte.
Und das Bittere: im EEPROM kann man das nicht reparieren. Die Frame-Tabelle liegt im nicht-flashbaren Mask-ROM. Das EEPROM steuert nur EDID, Strings und ein paar Patch-Routinen, nicht die Liste der angebotenen Auflösungen. Wer mit so einem Dongle echte DOS-Signale aufnehmen will, kommt um eine vorgeschaltete Scaler-Box nicht herum. Mehr dazu am Ende.
Was wir trotzdem geändert haben: die EDID
Wenn die Frame-Tabelle schon unantastbar ist, dann wenigstens die EDID anfassen. Ich habe das erste Detailed-Timing von 720p60 auf 1920×1080 bei 60 Hz umgeschrieben (148,5 MHz Pixeltakt, das Standard-CEA-861-1080p60-Timing), die EDID-Checksumme neu berechnet und das EEPROM zurückgeflasht. Das neue DTD #1 sieht so aus:
Nach einem Replug liefert das Gerät die modifizierte EDID. Zumindest dachte ich das. Ob sie auch wirklich bei einer Quelle ankommt, war eine ganz eigene Odyssee, dazu komme ich beim A/B-Test. Vorweggenommen: Die Mod tut technisch genau das, was sie soll, sie ändert nur am Ende nichts an dem, was aufgenommen wird. Eine reine „ich sage der Quelle, ich kann 1080p“-Kosmetik.
Was NICHT geklappt hat: die Strings
Das ist der lehrreichste Teil des Projekts, gerade weil er bis heute offen ist. Ich wollte die USB-Function-Strings ändern, aus dem hässlichen „AFN_Cap video“ sollte ein sauberes „VGA Capture HD“ werden. Das EEPROM-Schreiben verifiziert sauber per Readback-Hash. Die EDID-Mod aus demselben Reflash funktioniert. Aber die Strings fallen nach dem Replug auf die ROM-Defaults „USB Video“ und „USB Digital Audio“ zurück. Irgendetwas in der Firmware sagt „nein“.
Also empirisch rangegangen, drei Single-Byte-Tests in der Strings-Region 0x10 bis 0x2F: einmal ein ASCII-Zeichen geändert, einmal ein FF-Padding-Byte, einmal das Längen-Byte. Jeder einzelne dieser Eingriffe löst den Fallback aus. Egal welches Byte, egal welcher Inhalt. Das ist eine klare Indikation für ein Content-Gate über die gesamte 32-Byte-Region, nicht für eine simple Längen- oder Inhaltsprüfung an einer Stelle.
Ein Gegencheck zur eigenen Analyse hat ein paar Punkte geschärft. Die Bytes 0x02 und 0x03 (03 8E) sind verifiziert die Payload-Länge und keine Checksumme: 910 Bytes ab 0x30 reichen bis 0x3BD, exakt bis vor den End-Marker. Der Verdacht: ein lokales Validierungs-Gate auf den 32-Byte-Strings-Slots, wahrscheinlich ein Hash oder ein Exact-Content-Compare in einem ROM-Helper, nicht im Patch-Code selbst. Ein Quervergleich mit dem usbkvm-Projekt zeigt dasselbe Header-Muster bei verwandter Hardware.
Der spannendste Nebenbefund kam aus einem XDATA-Boot-Trace bei 0xC630 bis 0xC67F: die „AFN_Cap“-Strings landen gar nicht dauerhaft im RAM. Was dort steht, ist die Fallback-Variante. Die echten Strings werden erst zur Laufzeit beim USB-GetDescriptor aus dem EEPROM gebaut, und genau in diesem Moment greift offenbar das Gate. Wer das knacken will, müsste den USB-Control-Transfer mit usbmon und Wireshark während der Enumeration mitschneiden, die ROM-Helper bei 0x6345 und Nachbarn disassemblieren, oder mit mshack einen Bypass-Patch auf den Fallback-Branch setzen. Der schnellste Weg wäre allerdings, ein vom offiziellen MacroSilicon-Windows-Tool editiertes EEPROM byteweise gegen mein eigenes zu diffen. Dieses Tool schreibt vermutlich versteckte Metadaten mit, die das öffentliche Reverse-Engineering noch nicht dokumentiert hat. Das ist mein heißester Kandidat fürs Strings-Mysterium, aber bisher unbewiesen.
Der A/B-Test, oder: die Suche nach einer ehrlichen VGA-Quelle
Ich wollte zwei Dinge empirisch klären. Erstens: Kommt die modifizierte 1080p-EDID überhaupt bei der Quelle an? Zweitens: Löst das Ding echtes 1080p auf oder ist das hochskalierter Matsch? Beides braucht eine VGA-Quelle, die ihre DDC-Leitung auch wirklich ausliest. Das war schwerer zu finden als gedacht.
Erster Anlauf, ein Notebook mit „VGA-Out“. Plot-Twist: der VGA-Anschluss lief über einen aktiven DisplayPort-auf-VGA-Adapter und tauchte als DP-4 auf. Der Adapter liefert ein eigenes synthetisches EDID („NVD“, „LCD_VGA“, 1280×1024). Das ist nicht das EDID aus dem Dongle. Der EDID-Pfad vom Dongle bis zur GPU ist also unterbrochen. Erste Lehre: aktive DP-auf-VGA-Adapter verhalten sich wie eine eigene EDID-Quelle und maskieren alles dahinter.
Zweiter Anlauf, ein ThinkPad L560 mit echter VGA-Buchse hinten. Wieder gescheitert, und zwar aus einem prinzipiellen Grund. Ab Haswell und Skylake hat Intel den analogen RAMDAC komplett aus der GPU geworfen. Die physische VGA-Buchse hängt an einem Onboard-DP-auf-VGA-Bridge-Chip. Der Kernel verrät es selbst:
Null Byte EDID. Die Bridge reicht das DDC vom Dongle nicht durch, der Connector bietet nur die VESA-Default-Modi an. Exakt dasselbe Problem wie beim ersten Notebook, nur diesmal onboard statt als Dongle. Auf beiden getesteten Bridge-Pfaden kam die EDID des Capture-Sticks nicht zur Quelle durch. Als Trend lässt sich sagen: neuere Intel-Notebooks haben den analogen RAMDAC verloren (der fiel etwa um Haswell und Broadwell, also rund 2013 bis 2015) und führen „VGA“ über DP-Bridges, die DDC abschneiden. Das als „kein Notebook taugt je“ zu verkaufen wäre übertrieben, es ist ein Trend, kein Beweis.
Ein netter Nebenbefund vom L560, den ich erst für einen kaputten Aufbau hielt: nach jedem Auflösungswechsel liefert der Dongle erstmal 1 bis 6 Sekunden ein komplett schwarzes Bild, bis die MS9288A-PLL wieder eingerastet ist. Ich hatte reihenweise schwarze Frames gegrabbt und schon den Analogpfad für tot erklärt. In Wirklichkeit hatte ich nur immer ins Re-Lock-Fenster reingeschossen. Mit 4 bis 6 Sekunden Settle-Zeit kommt das Bild stabil. Passt zur dokumentierten Sync-Trägheit des Chips.
Der A/B-Test selbst
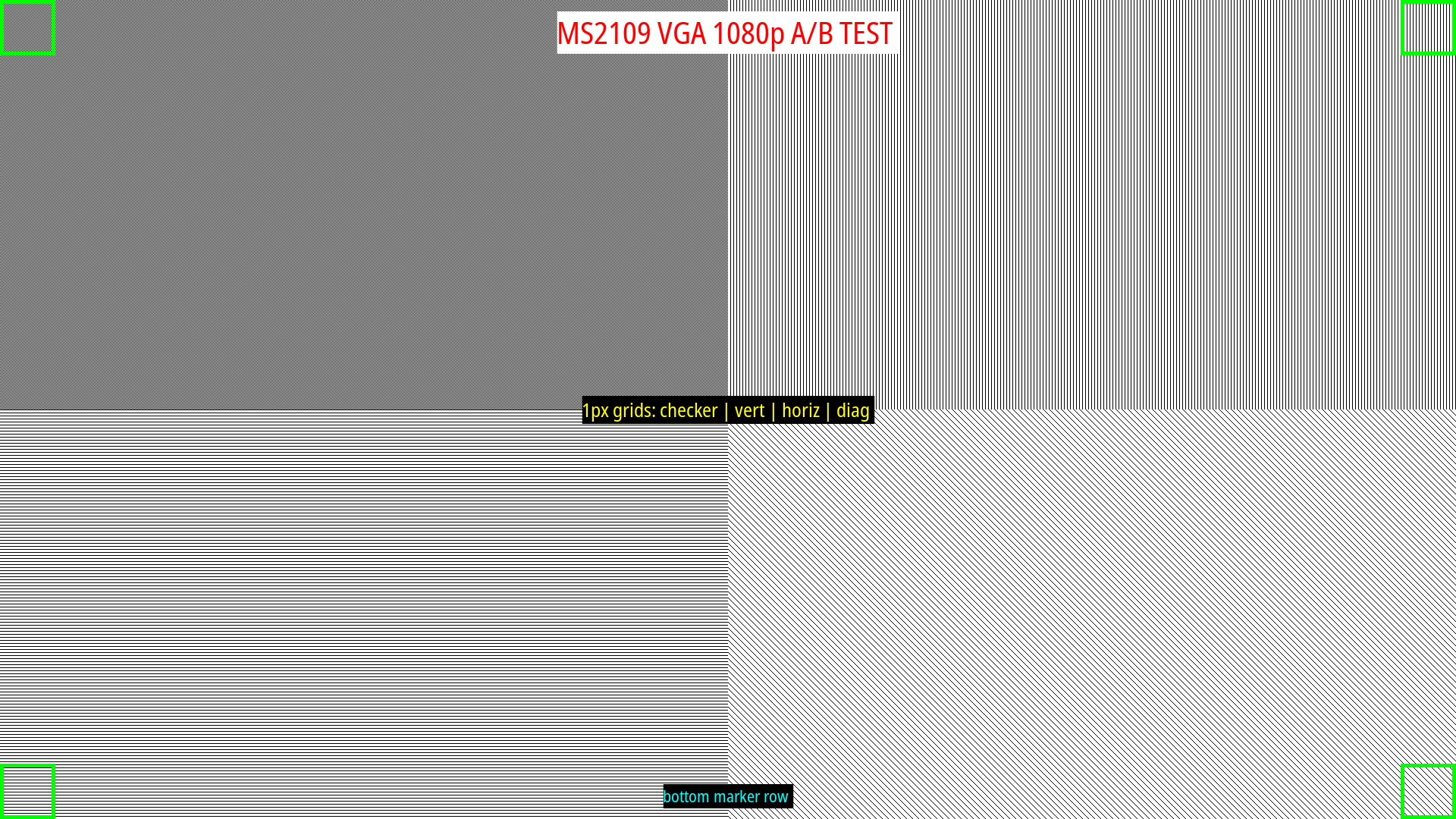
Trotz blockiertem DDC habe ich den A/B durchgezogen, einfach um es schwarz auf weiß zu haben. Als Quelle ein 1920×1080-Testbild mit vier Quadranten aus 1-Pixel-Gittern: Schachbrett, vertikale Linien, horizontale Linien, Diagonale. Dazu grüne Eck-Marker, um sicher zu sein, dass der ganze Frame ankommt.
Das Quell-Testbild: vier Quadranten mit 1px-Schachbrett, Vertikal-, Horizontal- und Diagonalgittern, dazu Eck-Marker.
Erst der Befund, der mich am meisten interessiert hat: 1px-Vertikallinien und Schachbrett kollabieren zu flachem Grau, das horizontale Feindetail ist weg. 1px-Horizontallinien und Diagonale zeigen schwache Resttextur. Die vertikale Auflösung kommt also weitgehend durch (jede Scanline ist eine eigene analoge Zeile), die horizontale ist deutlich begrenzt. Wichtiges Ehrlichkeits-Caveat: das ist die komplette Analogkette, also Bridge-DAC im L560, Kabel und MS9288A-ADC zusammen. Mit diesem Aufbau lässt sich nicht sauber trennen, wieviel davon der Dongle ist.
Dann der eigentliche EEPROM-A/B. EEPROM gegen das Original-Backup getauscht, Readback-Hash jedes Mal verifiziert. Etwas, das ich erst lernen musste: nach dem Flashen muss der Dongle einmal physisch ab- und wieder angesteckt werden. Ein reiner USB-Bus-Reset reicht nicht, der 8051 läuft einfach weiter und liest das neue EEPROM gar nicht ein. Software-seitig ging das nicht (kein schaltbarer Port), also von Hand. Die Zahlen, ImageMagick MAE auf einer Skala von 0 bis 1:
Vergleich
MAE
pro 255
Rauschen mod3 (zwei Aufnahmen, gleiches EEPROM)
0,0041
1,05
Rauschen Original
0,0043
1,10
mod3 gegen Original
0,0071
1,82
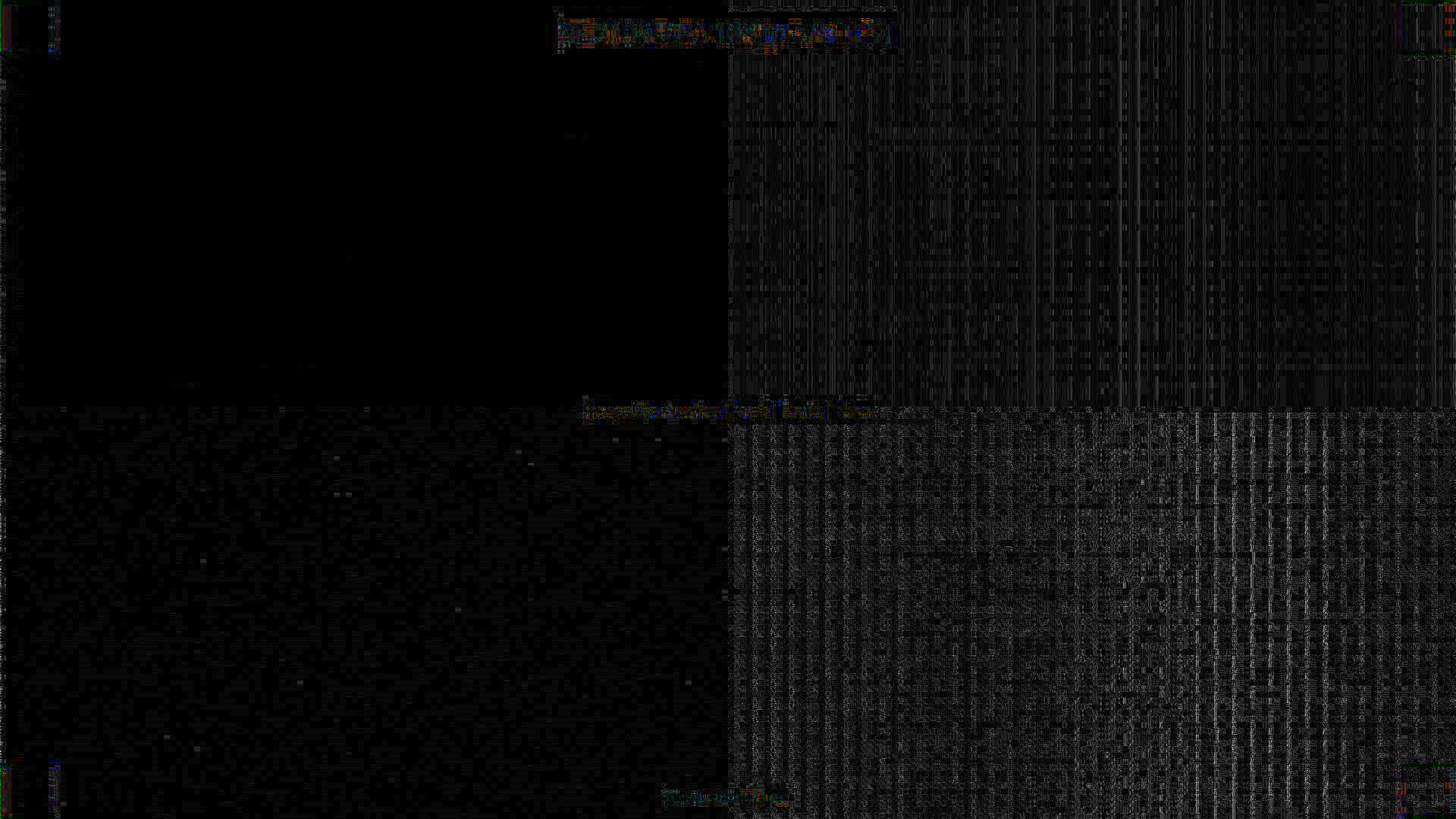
Der Cross-Wert liegt nur minimal über dem Rauschpegel. Das maximal verstärkte Differenzbild zeigt keine strukturierte Änderung, nur MJPEG-Blockrauschen in den hochfrequenten Quadranten. Die kleine Differenz ist Re-Lock- und AGC-Varianz zwischen den Sessions, nicht das EDID.
Maximal verstärkte Differenz: mod3-EDID gegen Original-EDID. Nur Blockrauschen, keine Struktur. Die EDID-Mod ändert am Bild nichts.
Fazit des A/B: Die EDID-Mod von 720p auf 1080p verändert das aufgenommene Bild exakt null. Aus erstem Prinzip war das klar, die EDID ist das, was das Gerät der Quelle anbietet, sie steuert nicht den Aufnahmepfad. Aber jetzt steht es empirisch da.
Endlich eine echte Analog-Quelle, und zwei dicke Befunde
Dritter Anlauf, diesmal ein Desktop mit einer NVIDIA GeForce GT 630 (Kepler). Kepler hat noch einen echten analogen RAMDAC, über einen passiven DVI-I-auf-VGA-Adapter kommt echtes analoges VGA raus. Endlich die Hardware, die den Notebooks fehlte.
Befund 1: Die EDID-Mod ist sogar grundsätzlich für die Katz. Der NVIDIA-Treiber cached die analoge EDID hartnäckig (analoges VGA hat kein Hotplug), also einmal lightdm neugestartet für einen frischen Read. Das Ergebnis im Xorg-Log:
(--) NVIDIA(GPU-0): CRT-0: connected
(WW) NVIDIA(0): CRT-0 does not have an EDID
Der Dongle liefert auf seinem VGA-Eingang gar keine DDC und keine EDID. Sauber belegt: derselbe Adapter hat vorher die EDID eines echten Monitors gelesen (ein Fujitsu P24-9, mit 1920×1080 und physischen Maßen), der Adapter reicht DDC also durch. Es ist der Dongle, der nichts treibt. Das kippt eine Annahme aus meinen eigenen Notizen, wo stand, das Patch-Modul beantworte „wahrscheinlich“ DDC-Reads. Dieses „wahrscheinlich“ war nie gemessen.
Ehrlich bei der Konfidenz bleiben: hoch dafür, dass in diesem GT-630-Test keine lesbare EDID vom Dongle kam. Nur mittel für das universelle „keine Quelle sieht die EDID je“. Restzweifel, die ich noch nicht ausgeräumt habe: NVIDIA-Eigenheiten bei analogem DDC, ob die Dongle-DDC die 5 Volt auf VGA-Pin 9 braucht, oder ob der DDC-Responder erst nach Sync-Lock aufwacht. Ein Pin-9-Check plus Logic-Analyzer auf den Pins 12 und 15 (mit dem Fujitsu als Positiv-Kontrolle) würde es hart machen. Arbeitshypothese: auf dem getesteten echten Analogpfad präsentierte der Dongle keine lesbare EDID, vermutlich weil der VGA-DDC-Pfad in der geteilten HDMI/VGA-Codebasis schlicht nicht verdrahtet ist. HDMI hat HPD und DDC, VGA hier offenbar nicht.
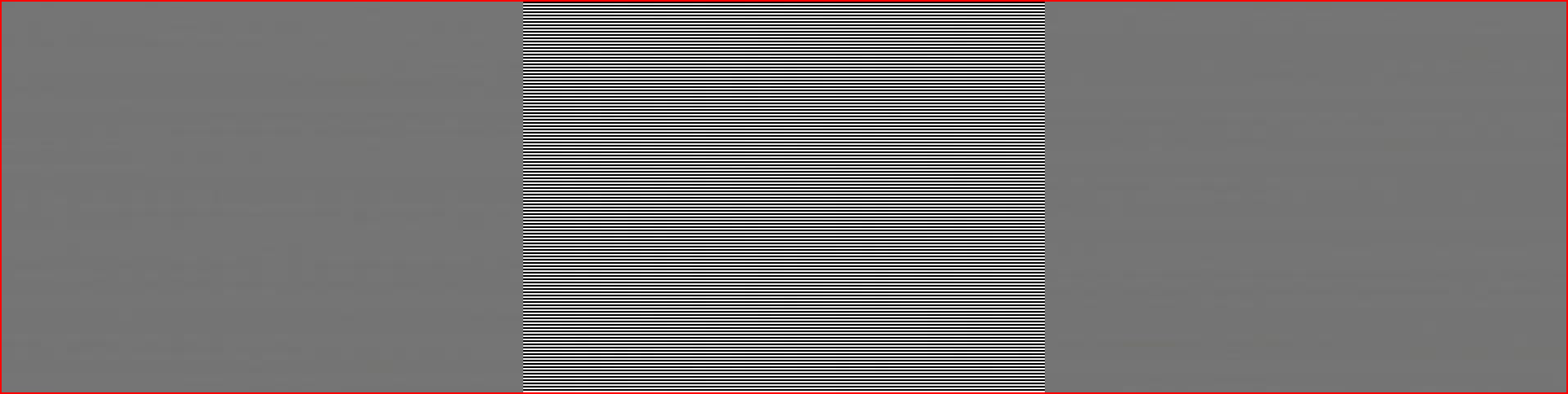
Befund 2: Das „1080p“ ist vertikal echt, horizontal Fake. Mit echtem RAMDAC konnte ich endlich den Dongle-Anteil am Blur isolieren (eigene xorg.conf mit UseEDID false und forciertem 1080p-Modeline, NVIDIA lehnt xrandr-Modelines ab). Testbild: reine 1px-Schwarz-Weiß-Gitter per xsetroot. Das Resultat, gemessen als Standardabweichung der Luma (ein ideales Gitter liegt bei rund 128, flaches Grau bei 0):
1px-Gitter bei echtem Analog-1080p
Std-Abw.
Bedeutung
horizontale Linien
119
vertikal sauber aufgelöst
vertikale Linien
0,6
horizontal komplett verschmiert
Schachbrett
0,55
weg
Echte Analog-Quelle (GT 630): links das vertikale 1px-Gitter zu Grau verschmiert, mittig horizontale Linien gestochen scharf, rechts das Schachbrett weg.
Der Dongle hat also echte 1080 Zeilen vertikal, aber horizontal kommt weit weniger als 1920 Pixel an. Und weil hier kein Bridge mehr dazwischen sitzt: der Blur ist der Dongle selbst, nicht das billige Notebook. Das ist die belastbare Aussage.
Den Mechanismus habe ich auf einen Vorschlag aus dem Gegencheck hin gleich nachgemessen, ein Phasen- und Balkenbreiten-Test. Das 1px-Gitter ist bei Phase 0 und Phase 1 gleich grau (Std-Abw. 0,18 gegen 0,19), ein PLL- oder Phasen-Mislock ist damit ausgeschlossen, sonst würde der 1px-Versatz den Kontrast kippen. Und der Kontrast steigt sauber mit der Balkenbreite: 1px liegt bei rund 0, 2px bei 35, 3px bei 61, 4px bei 79 (Ideal rund 128). Das ist die klassische Tiefpass-Signatur, also ein echtes Horizontal-Auflösungs-Limit und kein Lock-Artefakt. Ob das an der ADC-Abtastrate oder an einem internen Rescale liegt, kann ich noch nicht trennen, aber beides heißt: der Dongle begrenzt die Horizontalauflösung.
Balkenbreiten-Rampe: 1px bleibt grau, ab 2px wird Kontrast sichtbar. Klassische Tiefpass-Signatur, ein echtes Horizontal-Limit.
Warum YUYV bei 1080p nur 5 fps macht
Zum Schluss noch die berüchtigte 5-fps-Grenze, diesmal gemessen statt aus der Tabelle abgeschrieben (Quelle GT 630 bei 1080p60, v4l2-ctl --stream-mmap):
Format bei 1920×1080
gemessen
MJPEG
29 fps (Tabelle: 30)
YUYV (unkomprimiert)
exakt 5,0 fps
Meine erste Erklärung mit „ungefähr 40 MB/s USB-2.0-Bandbreite“ war zu schludrig. Der genaue Grund ist das Payload-Limit des isochronen UVC-Endpoints. Das größte Altsetting des Video-Endpoints ist 3 mal 1024 Bytes pro Microframe, also 24,576 MB/s (steht so im lsusb -v). Unkomprimiertes YUYV bei 1080p sind 1920 mal 1080 mal 2 Bytes, also 4,15 MB pro Frame. Die Firmware-Frametabelle ist genau so gewählt, dass die YUYV-Raten knapp darunter passen:
1080p mal 5 fps = 20,7 MB/s
720p mal 10 fps = 18,4 MB/s
480p mal 30 fps = 20,7 MB/s
Also keine generische „USB-2.0-Bandbreite“, sondern der High-Speed-Isoch-Endpoint plus die fest verdrahteten Frametabellen. MJPEG komprimiert vorher, deshalb bleiben dort 30 fps bei 1080p und bis zu 60 bei 720p und darunter. Klare Ansage: am MS2109 ist MJPEG bei hoher Auflösung Pflicht. Und „USB 3.0″ auf der Verpackung ist und bleibt gelogen, das Ding enumeriert als USB-2.0-High-Speed, ohne SuperSpeed.
Stabiles Device-Naming per udev
Damit das Gerät im Alltag immer unter demselben Pfad auftaucht, eine udev-Regel. Die Regeln stehen bewusst jeweils auf einer Zeile, weil mehrzeilige Fortsetzungen mit Backslash schnell zur Fehlerquelle werden:
Die GOTO-Konstruktion ist nötig, weil ATTRS{product}!="..." nicht so funktioniert, wie man denkt. udev sperrt die Attribut-Suche auf einen Parent-Device-Walk, und „Fehlen eines Attributs“ verhält sich anders als ein echtes Ungleich. Deshalb der Umweg über ein positives Match plus Sprungmarke.
Fazit, und der Workaround der wirklich hilft
Was bleibt? Der Dongle ist ein nettes Studienobjekt, aber für mein ursprüngliches Ziel, alte DOS-Signale aufnehmen, ist er unbrauchbar. Es gibt keine 70-Hz-Modi, und reparieren lässt sich das nicht, weil die Frame-Tabelle im Mask-ROM festgebrannt ist. Das „1080p“ ist horizontal Marketing, „USB 3.0″ eine glatte Lüge, und die EDID-Mod ist auf dem getesteten Analogpfad wirkungslos, weil der Dongle gar keine EDID treibt. Drei Korrektur-Momente gegenüber meinen ersten Annahmen, alle drei lehrreicher als wenn alles gleich funktioniert hätte.
Wer wirklich exotische VGA-Signale wie DOS-Textmodi sauber aufnehmen will, schaltet eine externe Scaler-Box vor. Mein Tipp ist GBS-Control, eine offene Firmware für die rund 20 Euro teuren GBS-8200-Boards. Sie nimmt das krumme Quellsignal, lockt sauber und gibt ein normgerechtes Bild aus, das jeder Capture-Stick frisst. Die andere Liga ist der Open Source Scan Converter, dessen Firmware-Update ich hier schon beschrieben habe. Wer es noch günstiger mag, fängt einen gebrauchten Extron-Scaler aus einer Konferenzraum-Ausmusterung.
Offen bleibt das Strings-Mysterium (ohne das Vendor-Tool komme ich an den Gate-Algorithmus nicht ran), die Disassembly des zweiten Patch-Blocks in Ghidra, ein Latenz-Benchmark für den Einsatz als KVM-Console-Viewer, und der finale DOS-Test mit GBS-Control davor. Material für einen zweiten Teil ist also reichlich da.
Habt ihr selbst schon so einen MS2109-Stick auseinandergenommen oder das Strings-Gate geknackt? Dann lasst es mich gerne wissen, ihr dürft mich jederzeit fragen.
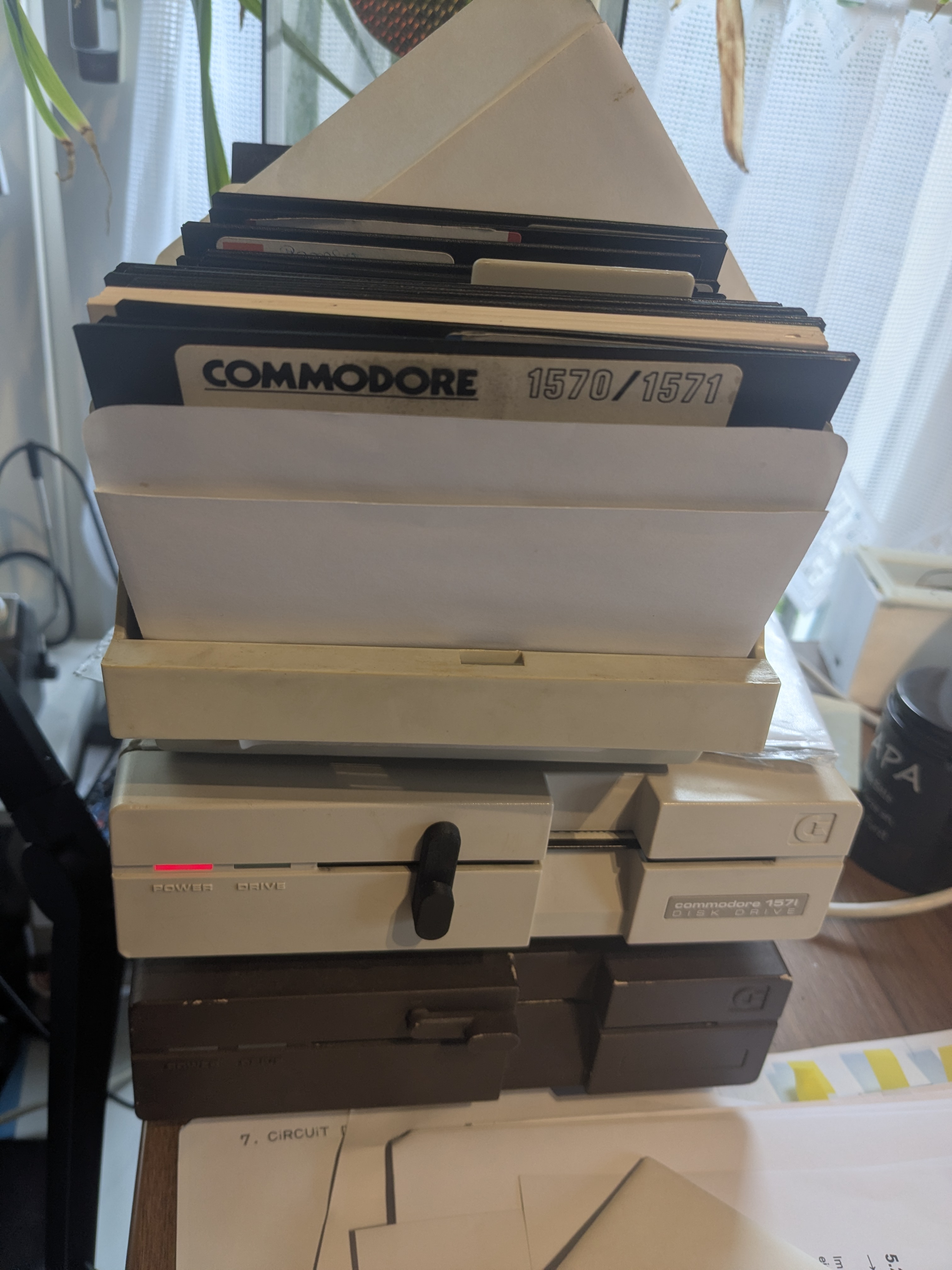
In meinem Keller stehen Kisten voller alter 5,25-Zoll-Disketten. Commodore-Software aus den späten 80ern, Spiele, Tools, selbstgeschriebener Kram. Das Problem mit Floppy-Disks: die Magnetisierung lässt mit der Zeit nach. Alle paar Jahre sollte man die Daten einmal komplett lesen und zurückschreiben, sonst wird das Medium irgendwann unlesbar. Mein letztes Auffrischen ist eine Weile her, also war es mal wieder Zeit. Zugegeben, ich arbeite nur noch extrem selten mit meinem Commodore; aber wenn ich es mache, ist es immer eine kleine Zeitreise voller Nostalgie für mich. Die Geräusche, der Geruch, die Wartezeit. Hin und wieder tut es mir einfach gut, noch mal die alten Spiele zu spielen, mit den Tools zu arbeiten oder auch meine ersten eigenen Programme noch mal zu starten, in den Code zu schauen *kopfschütteln*…. Ich habe sogar noch alte Hausaufgaben auf Disketten 😀
Was als routinemäßige Sicherungsaktion geplant war, wurde dann allerdings eine mehrtägige Debugging-Session. Inklusive eines Firmware-Bugs, der seit sechs Jahren im Code schlummerte.
Die Ausgangslage
Mein Setup: Zwei Commodore 1571 Laufwerke, angeschlossen über einen xum1541 USB-Adapter an einem Linux-Rechner. Der xum1541 sitzt auf einem TEENSY2-Board (ATmega32U4) und spricht über USB mit OpenCBM, einer Open-Source-Treibersammlung für Commodore-Laufwerke. Die Software-Seite hatte ich in einer vorherigen Session bereits verifiziert. Beide Laufwerke laufen bei fast perfekten 300,5 RPM, lesen und schreiben fehlerfrei auf beiden Seiten und liefern sogar bit-identische Images im Crosscheck.
Der Plan war simpel: Alle Disketten systematisch als 1:1-Image sichern, die physischen Medien durch Zurückschreiben auffrischen und nebenbei prüfen, ob die Inhalte bereits in Online-Archiven wie CSDB, Gamebase64 oder dem Internet Archive vorhanden sind.
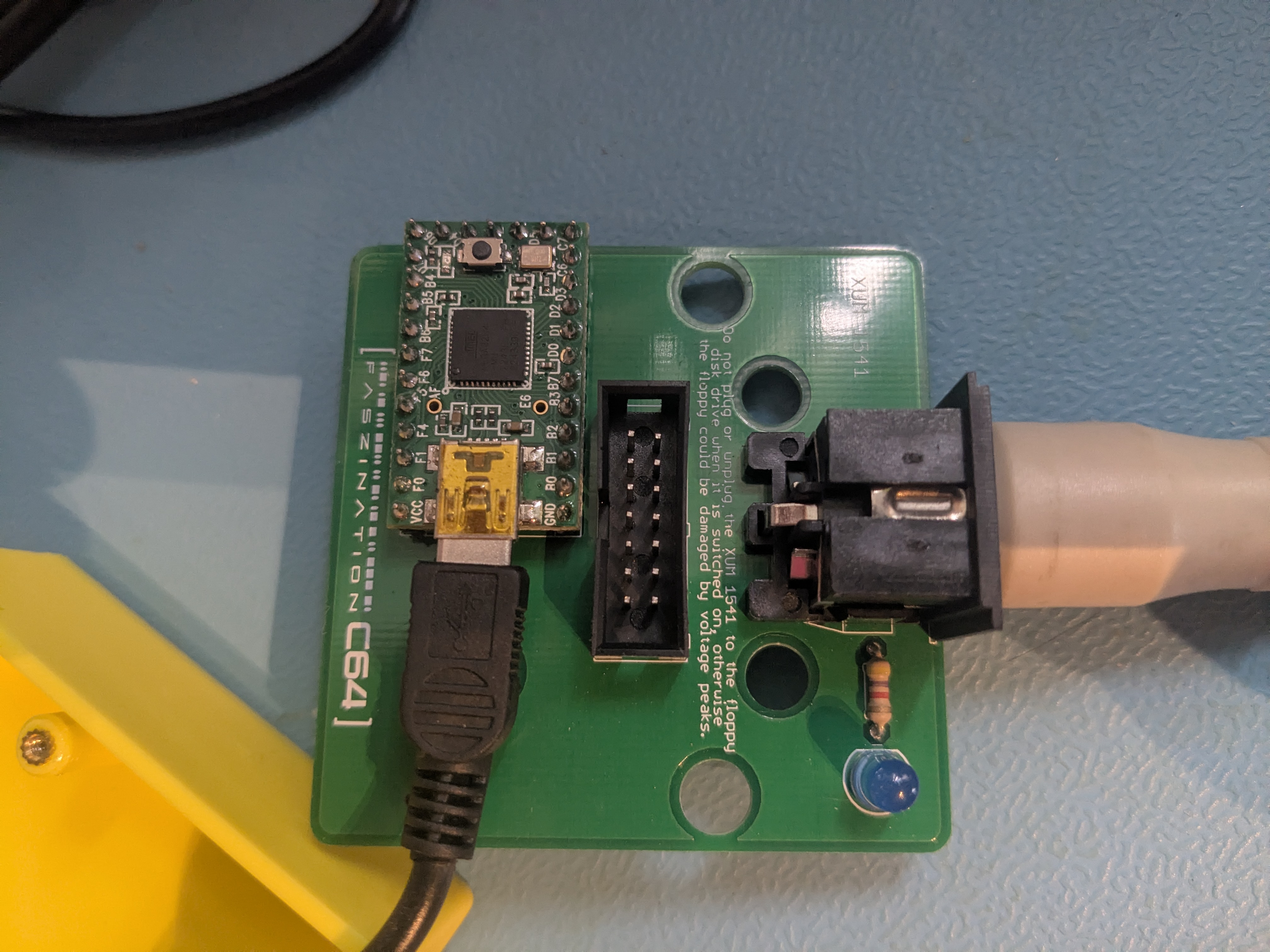
Der xum1541 im gelben Gehäuse. Links das USB-Kabel zum Linux-Rechner, rechts das IEC-Kabel zur 1571:
Und ein Blick auf die Platine mit dem Teensy2-Board (ATmega32U4), in dem der Firmware-Bug steckte:
Disk 001: Pirates! und das Kopierschutz-Problem
Die erste Disk war eine Pirates!-Kopie (Microprose, 1987), „imported by The Critters Inc 1221“. Mit d64copy ausgelesen, 683 Blocks, keine Fehler. Dann zurückgeschrieben und zur Verifikation nochmal gelesen. Checksummen stimmten nicht überein.
Die Analyse ergab: Das Original-D64 enthält drei Sektoren mit Error Code 5 (Data Block Checksum Error) auf Track 23 und 24. Das ist klassischer C64-Kopierschutz. Microprose nutzte absichtliche Lesefehler, um Raubkopien zu erkennen. Das Spiel prüft beim Start ob diese Fehler vorhanden sind, fehlen sie, verweigert es den Dienst.
d64copy arbeitet auf Sektor-Ebene und kann solche GCR-Level-Fehler nicht reproduzieren. Die Error-Info wird zwar im D64 gespeichert (Emulatoren wie VICE werten sie aus), aber auf der physischen Disk gehen die absichtlichen Fehler beim Zurückschreiben verloren. Für eine echte 1:1-Kopie inklusive Kopierschutz braucht man nibtools. Das arbeitet direkt auf GCR/Nibble-Ebene und liest die Rohdaten vom Laufwerk, inklusive aller Timing-Patterns und absichtlichen Fehler.
nibtools bauen und der erste Crash
nibtools liegt als Quellcode im OpenCBM-Quellbaum, muss aber separat gebaut werden. Ich habe den markusC64-v637 Branch von GitHub genommen. Build mit dem cc65 Cross-Compiler für den 6502-Floppy-Code und gcc für die Host-Tools ging glatt. Erster Versuch:
nibread -D8 image.nib
Ergebnis: LIBUSB_ERROR_PIPE. Der USB-Transfer bricht sofort ab, nachdem der Drive-Code hochgeladen ist. nibtools erkennt die 1571 korrekt und versucht SRQ-Burst-Transfers zu nutzen, ein schnelles serielles Protokoll das die CIA-UART der 1571 verwendet. Aber der Transfer scheitert schon beim Communication-Test.
Drei Schichten tief: der Firmware-Bug
Schicht 1: Bekannter SRQ-Bug in Firmware v7. Die xum1541-Firmware v7 hatte einen dokumentierten Bug: IEC_SRQ war als 0x80 definiert (Bit 7), aber die Lookup-Tabelle iec2hw_table hatte nur 16 Einträge (4 Bits). SRQ-Operationen griffen ins Leere. In v8 gefixt: IEC_SRQ auf 0x10 geändert, Tabelle auf 32 Einträge erweitert. Commit 3ef4fc0d von Spiro Trikaliotis, 2021.
Problem: Es gab kein fertiges v8-Hex für das TEENSY2-Board. Nur für ZOOMFLOPPY und PROMICRO. Die Boards haben unterschiedliche Mikrocontroller-Pin-Belegungen, also kann man die Firmware nicht einfach zwischen Boards tauschen. Lösung: AVR-Toolchain installiert (gcc-avr, avr-libc), v8 für TEENSY2 selbst gebaut und über den HalfKay-Bootloader geflasht.
Risikofrei, da der Bootloader in einem geschützten Flash-Bereich sitzt. Knopf am Teensy drücken, flashen, fertig.
Schicht 2: v8 geflasht, gleiches Problem. Auch mit v8 kommt LIBUSB_ERROR_PIPE. Die OpenCBM-Library musste ebenfalls neu gebaut werden, sie prüft die Firmware-Version und war noch auf v7 kompiliert. Neu gebaut, installiert. Immer noch Crash.
Schicht 3: Der eigentliche Bug. Also tiefer in den Quellcode. In board-teensy2.h, Funktion iec_srq_write():
Das wurde 1:1 von der ZoomFloppy-Implementierung kopiert. Aber die Pin-Belegung ist bei den Boards unterschiedlich:
ZoomFloppy hat IO_DATA auf Port D, Bit 4 (PD4)
TEENSY2 hat IO_DATA auf Port F, Bit 0 (PF0)
Der Code schrieb auf den komplett falschen Port mit dem falschen Bit-Shift. Das erklärt warum der Communication-Test sofort fehlschlug. Die SRQ-Daten kamen nie auf den richtigen Pins an.
Der Fix, analog zur korrekten PROMICRO-Implementierung:
Die Änderungen im Detail: PORTD wird zu DDRF (richtiger Port für die IEC-Leitungen beim TEENSY2), der Shift von data >> 4 auf data >> 7 (Bit 7 des Datenbytes auf Bit 0 des Ports, wo IO_DATA liegt), und der ATN-Zustand wird über port_base_data erhalten, was vorher nicht berücksichtigt war. Timing von 0,935 µs auf 0,80 µs angepasst, passend zur PROMICRO-Implementierung.
Firmware neu gebaut (8260 Bytes, 32 mehr als vorher), geflasht. nibread läuft sofort fehlerfrei durch alle 41 Tracks. Der Bug steckte seit April 2020 im Code. Jeder mit einem TEENSY2-basierten xum1541 hatte dieses Problem bei SRQ-Transfers.
Den Fix habe ich als Pull Request eingereicht, der am 26. März vom OpenCBM-Maintainer Spiro Trikaliotis gemerged wurde. Damit ist auch ein seit 2021 offenes Issue im nibtools-Repository endlich geschlossen. Dort hatten andere User auf macOS und Fedora mit Teensy-basierten Adaptern exakt die gleichen LIBUSB-Fehler gemeldet, ohne dass die Ursache gefunden wurde.
Die bittere Lektion mit Disk 001
Die erste Pirates!-Disk, der Import von The Critters Inc, war zu diesem Zeitpunkt bereits zerstört. Ich hatte sie vor dem Fix mit d64copy zurückgeschrieben. Das hat die GCR-Level-Kopierschutzmuster überschrieben. Das anschließend mit nibread erstellte NIB-Image zeigt nur noch die „reparierten“ Sektoren, nicht den originalen Kopierschutz. Disk und Images entsorgt.
Die Lektion ist simpel und ärgerlich zugleich: Nie zurückschreiben, bevor das NIB-Image existiert.
RPM: Konstant 300,5 RPM (Nominal: 300). Die 1571 ist elektronisch geregelt, kein Trimmpoti
Kopierschutz-Typen: Error Code 5 (Checksum Errors) auf Pirates!, Killer Track (Track komplett mit Sync-Bytes) auf der Crocodile Soft Compilation
NIB-Format: ~336 KB pro Disk (41 Tracks × 8192 Bytes GCR-Rohdaten)
D64-Format: ~175 KB pro Disk (683 Sektoren × 256 Bytes + optional 683 Bytes Error-Info)
Fazit
Was als „schnell mal Disketten auffrischen“ geplant war, endete in einer Reise durch sechs Jahre alten Firmware-Code. Der Bug in iec_srq_write() war ein klassischer Copy-Paste-Fehler, der nie aufgefallen ist, weil kaum jemand nibtools mit einem TEENSY2-Board benutzt. SRQ-Burst-Transfers braucht man nur für nibtools, und die meisten Leute nutzen ohnehin einen ZoomFloppy-Adapter, wo der Code korrekt ist.
Der Verlust von Disk 001 ärgert mich immer noch. Aber die Lektion sitzt: Erst NIB, dann zurückschreiben. Und wenn ein Tool beim ersten Mal nicht funktioniert, lohnt es sich manchmal die Firmware aufzuschrauben, statt das Tool wegzulegen.
Der Blick ins Regal, wo das alles steht. Ja, es ist voll da unten:
Seit bestimmt zehn Jahren steht hier ein Voltcraft Charge Manager CM 2016 auf dem Schreibtisch. Irgendwann bei Conrad gekauft, als die tatsächlich noch Geschäfte in der Innenstadt hatten. Damals mit zwei kleinen Kindern war der Akkuverbrauch enorm. Spielzeugautos, Taschenlampen, Fernbedienungen, irgendwas war immer leer. Einwegbatterien waren teurer als heute (zumindest in meiner Erinnerung), und so wurde das Ladegerät schnell zum wichtigsten Gerät im Haushalt.
Das CM 2016 hat sechs unabhängige Ladeschächte (vier für AA/AAA, zwei für 9V-Blöcke) und kann deutlich mehr als nur Laden. Es misst Kapazitäten, erkennt defekte Akkus, kann Lade-/Entladezyklen fahren und hält Akkus per Trickle-Charge am Leben. Wer seine Akkus ernsthaft pflegen will, braucht so ein Gerät. Damit halten die Zellen länger, man kann sie wiederaufbereiten und erkennt rechtzeitig, wann einer reif für die Tonne ist.
Der Voltcraft Charge Manager CM 2016 mit eingelegtem Akku
In den letzten Jahren wurde es zugegebenermaßen weniger eingesetzt. Trotzdem laufen noch immer diverse Smarthome-Geräte und Notfall-Taschenlampen mit Akkus, und da ist ein ordentliches Ladegerät einfach Pflicht.
Das Problem: kein Linux, kein gar nichts
Das CM 2016 kommt mit einer Windows-Software. CM2016 Logger V2.10, eine .NET-Anwendung von 2013. Unter Linux funktioniert die selbstverständlich nicht. Es gibt ein paar Projekte, die das Gerät auf der Kommandozeile auslesen können, ein Java-Tool hier, ein Python-Script dort. Eine echte GUI für Linux oder FreeBSD? Fehlanzeige. Selbst als ich vor ein paar Tagen noch einmal gesucht habe: nichts. Eine kommerzielle Java-GUI existiert zwar, aber nur als 30-Tage-Trial.
Also habe ich mich selbst daran gesetzt.
Das Ergebnis: eine native GTK4-Anwendung
Das Ergebnis ist eine vollständige Desktop-Anwendung in Python mit GTK4 und libadwaita. Quelloffen, MIT-lizenziert, auf GitHub:
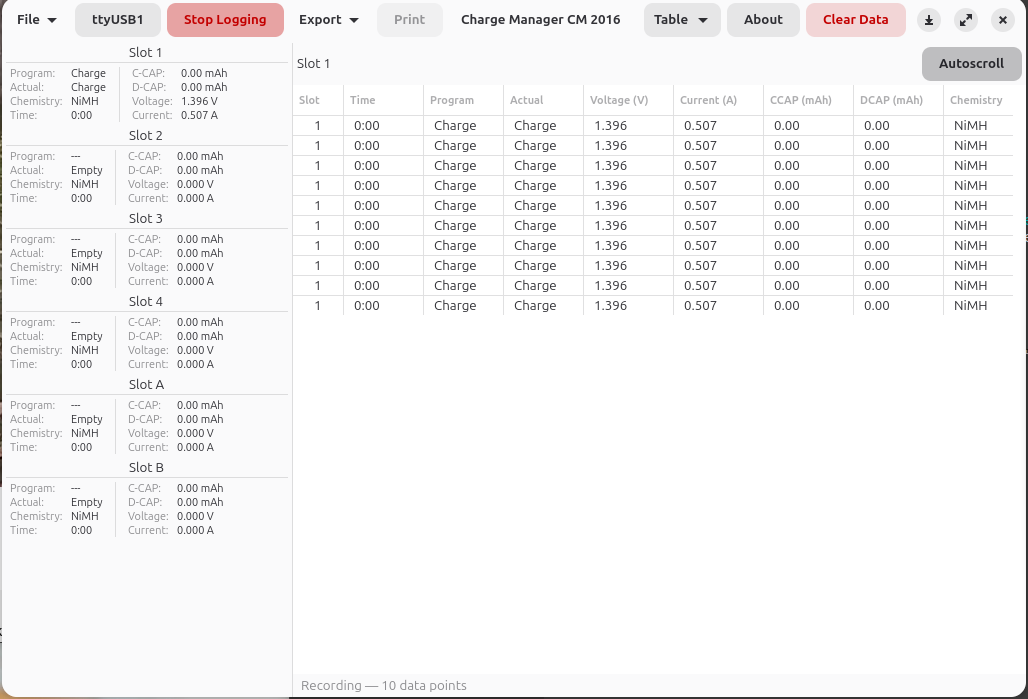
Hauptfenster mit Datentabelle während einer Live-Aufzeichnung
Die App erkennt das CM 2016 automatisch per USB (Silicon Labs CP210x Chip) und zeigt alle sechs Schächte in Echtzeit an. Alle zwei Sekunden kommen neue Messdaten rein: Spannung, Strom, Kapazität, Laufzeit, Programmstatus.
Was die App kann
Echtzeit-Überwachung aller 6 Ladeschächte mit Autoscroll und Slot-Filterung
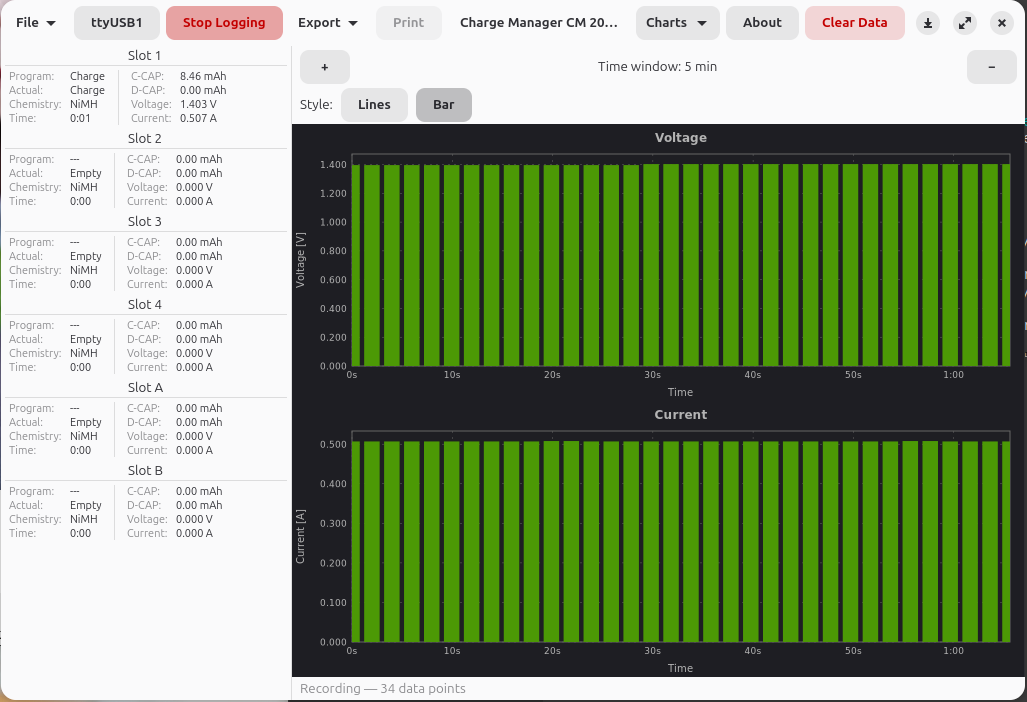
Spannungs- und Strom-Diagramme als Linien- oder Balkendiagramm mit Zeitfenster-Steuerung
Chart-Zoom per Maus-Drag, Scrollrad oder Tastatur, dazu Daten-Tooltips
Export als CSV oder Spreadsheet (.xlsx mit eingebetteten Diagrammen)
Druckfunktion für Messprotokolle im DIN A4 Querformat
Speichern und Laden von Aufzeichnungen (.cm2016 Dateien), inklusive Crash-Recovery über Temp-Dateien
Sleep-Inhibit: das System schläft nicht ein, solange aufgezeichnet wird
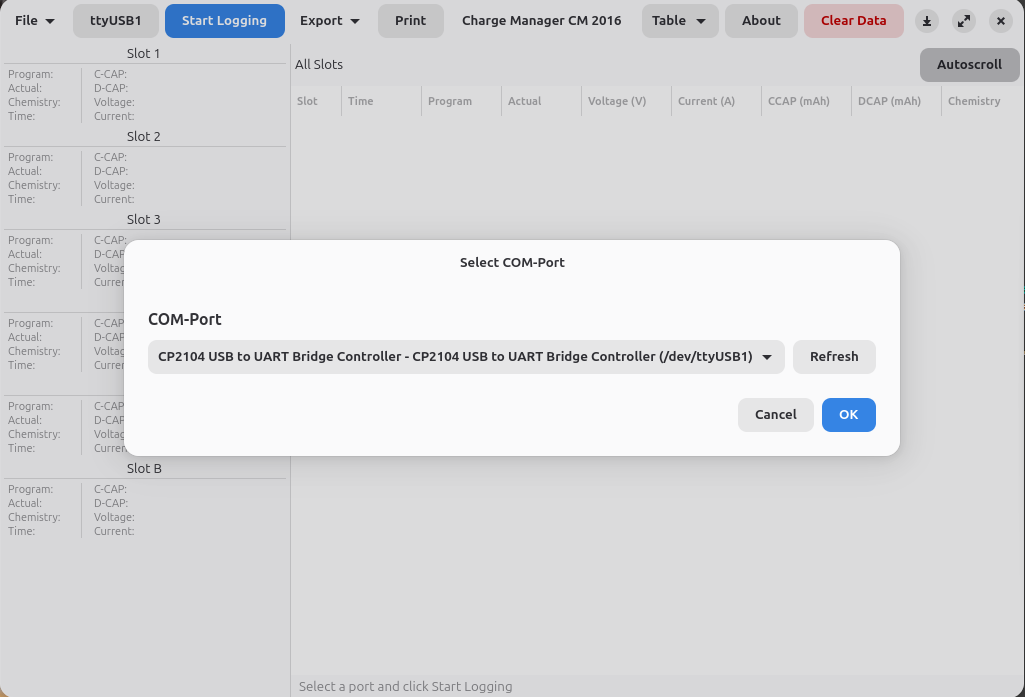
Liniendiagramme für Spannung und Strom über die ZeitBalkendiagramm-AnsichtPort-Auswahl mit automatischer Geräteerkennung
Das Protokoll: nicht ganz so dokumentiert wie gedacht
Das CM 2016 sendet alle zwei Sekunden einen 127-Byte-Frame über die serielle Schnittstelle (19200 Baud, 8N1). Die ersten sieben Bytes sind immer CM2016 , dann folgen zehn Bytes Header und je 18 Bytes pro Ladeschacht.
Klingt einfach. Ist es auch, bis man die existierende Dokumentation mit echten Messdaten vergleicht. Dabei sind mir ein paar Dinge aufgefallen, die so nirgendwo korrekt dokumentiert waren:
Kapazitätsfelder sind 32-Bit Little-Endian, nicht 24-Bit wie es in mehreren Quellen steht. Charge-Capacity und Discharge-Capacity belegen jeweils vier Bytes.
Der dokumentierte Byte-Swap für Discharge-Capacity war falsch. Mehrere Referenzprojekte haben die Bytes in der falschen Reihenfolge gelesen, was zu absurden Kapazitätswerten geführt hat.
Die Header-Bytes 7-16 waren bisher größtenteils undokumentiert. Tatsächlich stecken da die Firmware-Version, die eingestellte Akku-Chemie (NiMH/NiZn), Temperaturdaten und ein Action-Counter drin. Alles Big-Endian, im Gegensatz zu den Slot-Daten, die Little-Endian sind.
Die Kapazitätsskalierung hängt vom Slot-Typ ab: Slots 1-4 (AA/AAA) teilen durch 100, die beiden 9V-Slots teilen durch 1000. Gleiches gilt für den Strom: AA/AAA-Slots durch 1000, 9V-Slots durch 10000.
Das alles musste mit dem echten Gerät verifiziert werden. Akku rein, verschiedene Programme durchlaufen lassen, Rohwerte mit dem Display vergleichen. Klassisches Reverse Engineering, nur eben mit Ladeströmen statt mit Netzwerkpaketen.
Technik unter der Haube
Die Anwendung nutzt GTK4 mit libadwaita für eine zeitgemäße GNOME-Oberfläche. Dark Mode funktioniert automatisch. Die Diagramme werden mit Cairo gerendert, Benachrichtigungen laufen über den libadwaita ToastOverlay. Für den seriellen Zugriff kommt pyserial zum Einsatz, die CP210x-Erkennung läuft über die USB Vendor/Product ID von Silicon Labs.
Der Spreadsheet-Export erzeugt .xlsx-Dateien mit eingebetteten Diagrammen über openpyxl. Die Druckfunktion generiert DIN A4 Querformat mit allen Slots und Diagrammen. Sessions lassen sich als .cm2016-Dateien speichern und wieder laden, und falls die Anwendung während einer Aufzeichnung abstürzt, gibt es eine automatische Recovery über Temp-Dateien.
Insgesamt 135 Unit-Tests decken Parser, Protokoll und die Export-Funktionen ab.
Installation
Die App braucht GTK 4.14+ und libadwaita 1.5+. Unter Debian/Ubuntu/Mint:
Im letzten Beitrag zum Thema hatte ich angekündigt, dass ich mir auch den NB-2033-U vornehmen will. Der steckt in einem zweiten Fujitsu Notebook hier, dem von meiner Tochter Maja. Gleicher Hersteller, gleiche Sensorfamilie, sollte ähnlich laufen wie beim NB-2020-U. Dachte ich.
Falsch gedacht.
Hersteller sagt: geht nicht
Ich hatte bei NEXT Biometrics nach Protokolldokumentation oder einem SDK für den NB-2033-U gefragt. Kevin Hung, Director FAE, antwortete freundlich aber eindeutig:
„Both 2020-U and 2033-U have different firmware and USB stack. The code flow (libusb) related to 2033-U and 2020-U is different. This could be the reason for 2033-U failure/unsupported in linux. As of now, it is not supported.“
Kein SDK, keine Doku, kein Support. Und 74 Einträge auf linux-hardware.org mit Status „failed“ für die USB ID 298d:2033. Weltweit kein Linux-Support für dieses Gerät.
Gut. Dann eben Reverse Engineering.
Erster Versuch: Windows-Treiber belauschen
Plan A war klassisch: Windows-Treiber in einer VM laufen lassen, USB-Traffic mitschneiden. VirtualBox installiert, USB-Passthrough konfiguriert, Windows gestartet. Der Fingerabdruckleser tauchte im Gerätemanager auf. Mit Code 31. Treiber konnte das Gerät nicht starten. Secure Boot hatte VirtualBox den Kernel-Treiber nicht signiert, und der USB-Passthrough war damit unbrauchbar.
Plan A verworfen.
Plan B: Das SDK direkt auf Linux
Das SDK von NEXT Biometrics (libNBBiometrics.so) unterstützt den NB-2033-U intern. Es kommuniziert direkt über libusb, ohne Kernel-Treiber. Das heißt: ich kann das SDK-Sample direkt auf dem Linux-Notebook laufen lassen und gleichzeitig den USB-Traffic mit usbmon mitschneiden.
Dafür musste Secure Boot deaktiviert werden. usbmon ist ein Kernel-Modul, und lockdown=integrity (von Secure Boot gesetzt) blockiert es auch für root. Secure Boot im BIOS aus, lockdown=none in GRUB, Neustart. Danach:
7654 Zeilen USB-Traffic. Das komplette Protokoll des NB-2033-U, aufgezeichnet während einer Enrollment-Session.
Was dabei rauskam
Das Protokoll ist komplett anders als beim NB-1010-U/NB-2020-U. Kevins Aussage stimmte. Hier die wesentlichen Unterschiede:
Eigenschaft
NB-1010-U / NB-2020-U
NB-2033-U
Bulk IN Endpoint
EP 3 (0x83)
EP 1 (0x81)
Kommandoformat
[0x80][CMD][SEQ][0x00]...
[CMD][0x00][LEN_LO][LEN_HI][PAYLOAD] (TLV)
Finger-Erkennung
Einzelnes 0x38
Zwei 0x0D Config + 0x38
Bildübertragung
90 Chunks à 540 Bytes
180 Chunks à 268 Bytes
Init
Einmal 0x07
Zweimal 0x07 nötig
Gleicher Sensor-Die (256×180 Pixel, 385 DPI, aktiv thermisch), aber ein komplett anderer USB-Stack. Der NB-2033-U nutzt ein TLV-Format (Type-Length-Value) statt des festen Kommandoschemas vom NB-1010-U. Jedes Kommando hat eine eigene Längenangabe, und die Antworten sind anders strukturiert.
Die Kommandos im Detail
Aus dem USB-Capture konnte ich sechs Kommandos identifizieren:
0x07 — Init/Wake. Muss zweimal gesendet werden, sonst reagiert der Sensor nicht.
0x0D — Sensor-Konfiguration. Wird zweimal vor jeder Finger-Erkennung gebraucht, um den „Enhanced“ Modus zu aktivieren.
0x38 — Finger-Erkennung. Byte 4 der Antwort ist der Detect-Level. Schwellwert 40.
Der Sensor misst Temperaturänderungen, nicht statischen Kontakt. Das klingt nach einem Detail, ist aber für die Treiber-Implementierung entscheidend. Finger auflegen erzeugt einen kurzen Spike im Detect-Wert (10 bis 50+). Finger bleibt liegen, und der Wert fällt zurück auf Basisniveau. Der Treiber muss also den Spike erkennen, nicht einen dauerhaften Zustand.
Dazu kommt: Nach dem Init gibt es transiente Spikes, die ungefähr 1,5 Sekunden brauchen, bis sie abklingen. Ohne Settle-Pause nach dem Init erkennt der Treiber Phantom-Finger.
Der Treiber
Rausgekommen ist nb2033.c, ein eigenständiger libfprint-Treiber mit rund 350 Zeilen. Kein proprietärer Code, keine SDK-Abhängigkeit. Das SDK diente nur als Referenz für die Capture-Analyse, der Treiber ist sauber von Grund auf geschrieben. Lizenz: LGPL 2.1+ wie alle libfprint-Treiber.
Der Merge Request ist eingereicht: MR !574 bei libfprint. Fünf Dateien: der neue Treiber, meson.build, autosuspend.hwdb und die Allowlist. CI läuft durch. Der verwandte MR !569 für den NB-2020-U ist noch in Review.
Für die Wiki-Aktualisierung (das Gerät von der „unsupported“ Liste nehmen) gibt es Issue #134.
Fazit
Der Hersteller sagt „not supported“, 74 Linux-User melden „failed“, und trotzdem war das an einem Nachmittag erledigt. SDK auf Linux ausführen, USB-Traffic mitschneiden, Protokoll rekonstruieren, Treiber schreiben, testen, upstream einreichen. Alles mit Open-Source-Tools: usbmon, libusb, libfprint.
Das Ergebnis: Majas Notebook hat jetzt einen funktionierenden Fingerabdruckleser unter Linux. Und sobald der Merge Request durch ist, haben ihn alle anderen auch.
Wir haben 2026. Alles wandert in die Cloud. Trotzdem will ich heute über serielle Konsolen schreiben. Klingt retro, ist es aber nicht. Wenn ein Switch sich verkonfiguriert hat und das Netzwerk weg ist, hilft kein Ansible und kein Dashboard in der Cloud. Dann hilft nur noch der serielle Konsolenport. Out-of-Band Management ist nicht tot. Es wurde nur teuer verpackt.
Kommerzielle Konsolenserver kosten gerne vierstellig. Oder man nimmt einen Raspberry Pi der noch herum liegt und auf eine neue Aufgabe wartet (ich habe hier ein paar Pi1 oder 2 herum liegen). Zusammen mit zwei USB Serial Adaptern hat man für unter 50 Euro einen Konsolenserver mit acht Ports. Das reicht für die meisten Setups locker aus.
Wofür ein Konsolenserver
Der klassische Fall: Ein paar Switches im Rack, jedes Gerät hat einen seriellen Konsolenport. Im Normalbetrieb konfiguriert man über das Netzwerk. Aber wenn mal eine falsche Route das Management Interface unerreichbar macht oder ein VLAN Umbau schiefgeht, steht man vor dem Gerät und steckt ein Kabel rein. Wenn das im DC in Frankfurt ist, oder vielleicht irgendwo in China, dann kann das spannend werden.
Oder man hat vorgebaut.
Ein Konsolenserver hängt permanent an den seriellen Ports der Netzwerkgeräte. Man kommt per SSH auf den Konsolenserver und von dort auf die serielle Konsole des Zielgeräts. Ob das Netzwerk funktioniert oder nicht, spielt keine Rolle mehr. Öhm also ja, so grob. Der Pi sollte dann ja schon noch erreichbar sein. Aber man hat ja in einem entfernten DC auch eine Dailin Line oder ähnliches, richtig? Richtig?
Hardware
Ein Raspberry Pi. Es muss kein aktuelles Modell sein. Selbst ein alter Pi 2 reicht völlig aus. Das Ding muss ser2net laufen lassen und ein paar serielle Ports bedienen, dafür braucht man keinen Quad Core mit 8 GB RAM. Der Pi aus der Schublade bekommt endlich eine sinnvolle Aufgabe.
FTDI Quad Port USB Serial Adapter (Vendor 0403, Product 6011). Pro Adapter bekommt man vier serielle Ports. Mit zwei Adaptern hat man acht Ports. Die Dinger gibt es für kleines Geld.
RS232 Kabel zu den Console Ports der Netzwerkgeräte. Welcher Stecker passt, hängt vom Hersteller ab. RJ45 auf DB9, DB9 auf DB9, die üblichen Verdächtigen. Da muss man schauen was die eigenen Geräte mitbringen.
Stabile Gerätenamen mit udev
Das erste Problem nach dem Einstecken der USB Adapter: Linux vergibt die /dev/ttyUSBx Nummern nach Lust und Laune. Nach einem Reboot kann ttyUSB0 plötzlich ttyUSB4 sein. Wenn man wissen will welcher Port an welchem Gerät hängt, ist das unpraktisch.
Die Lösung sind udev Regeln. Jeder FTDI Adapter hat eine eigene Seriennummer. Die findet man so:
udevadm info -a -n /dev/ttyUSB0 | grep serial
Damit baut man sich Regeln die stabile Symlinks erzeugen. Datei /etc/udev/rules.d/99-serial-consoles.rules:
FT000001 und FT000002 ersetzt man durch die echten Seriennummern der eigenen Adapter. Das Ergebnis sind stabile Symlinks: /dev/quad0-00 bis /dev/quad0-03 für den ersten Adapter, /dev/quad1-00 bis /dev/quad1-03 für den zweiten. Acht Ports, immer gleich benannt. Egal wie oft man den Pi neustartet.
ser2net
ser2net bildet die seriellen Ports auf TCP Ports ab. Man kann dann per Telnet auf einen bestimmten Port zugreifen und landet direkt auf der seriellen Konsole des zugehörigen Geräts. Installieren mit apt install ser2net, dann die Konfiguration in /etc/ser2net.conf:
9600 8N1 ist der Standard bei den meisten Netzwerkgeräten. Falls ein Gerät eine andere Baudrate braucht, passt man die entsprechende Zeile an. Der Timeout von 600 Sekunden trennt die Verbindung nach zehn Minuten Inaktivität. Das verhindert dass ein vergessenes Telnet die Konsole dauerhaft blockiert.
Direkter Zugriff mit minicom
Wer ser2net nicht nutzen will oder schnell direkt auf einen Port muss, nimmt minicom:
minicom -D /dev/quad0-00 -b 9600
minicom ist gut für schnelle Tests und Debugging. Für den Dauerbetrieb mit mehreren Ports gleichzeitig ist ser2net die bessere Wahl.
Warum localhost
ser2net ist im gezeigten Setup bewusst auf localhost gebunden. Man muss sich erst per SSH auf den Pi einloggen und dann telnet 127.0.0.1 200x aufrufen. Das ist Absicht.
Man könnte ser2net auch auf 0.0.0.0 binden und die Ports direkt aus dem Netz erreichen. Davon rate ich ab. Telnet ist unverschlüsselt. Auch in einem Management VLAN hat das nichts verloren.
Bessere Alternativen wenn man ohne SSH auf den Pi will:
ser2net ab Version 4.x unterstützt SSL/TLS. Damit hat man verschlüsselte Verbindungen direkt zu den Console Ports.
stunnel vor ser2net schalten. stunnel terminiert TLS und reicht die Verbindung an den lokalen ser2net weiter.
Wer nativen SSH Zugriff direkt auf die seriellen Ports braucht, sollte sich conserver anschauen. ser2net kann kein SSH.
Für die meisten Setups ist SSH auf den Pi und dann Telnet auf localhost der einfachste und sicherste Weg.
Absichern
Ein paar Dinge die man auf dem Pi noch machen sollte:
Den Default Benutzer pi löschen. Einen eigenen Benutzer anlegen. SSH Key Authentifizierung einrichten und Login per Passwort deaktivieren. Das ist nicht optional.
NTP konfigurieren. Timestamps in Logs sind nutzlos wenn die Uhrzeit nicht stimmt.
Syslog an einen zentralen Logserver weiterleiten. Wenn man serielle Konsolen mitschneidet, will man die Logs nicht nur lokal auf dem Pi haben.
Workflow
Der Alltag sieht dann so aus:
SSH auf den Pi: ssh admin@10.0.0.50
Telnet auf den gewünschten Port: telnet 127.0.0.1 2003
Man landet auf der seriellen Konsole von Switch 3
Alternativ direkt mit minicom: minicom -D /dev/quad0-02 -b 9600
Zum Trennen: Ctrl-] und dann quit bei Telnet. Ctrl-A gefolgt von X bei minicom.
Fazit
Ein alter Raspberry Pi, zwei USB Adapter, ein paar Kabel. Mehr braucht man nicht für einen funktionierenden Konsolenserver mit acht Ports. Die Einrichtung dauert vielleicht eine Stunde. Danach läuft das Ding und man muss nie wieder ein Konsolenkabel quer durch den Serverraum schleppen.
Und der alte Pi aus der Schublade hat endlich wieder eine Aufgabe.
Ihr habt Fragen, Anmerkungen oder baut das Setup selbst nach? Meldet euch gerne über die Kontaktseite oder direkt per E-Mail.
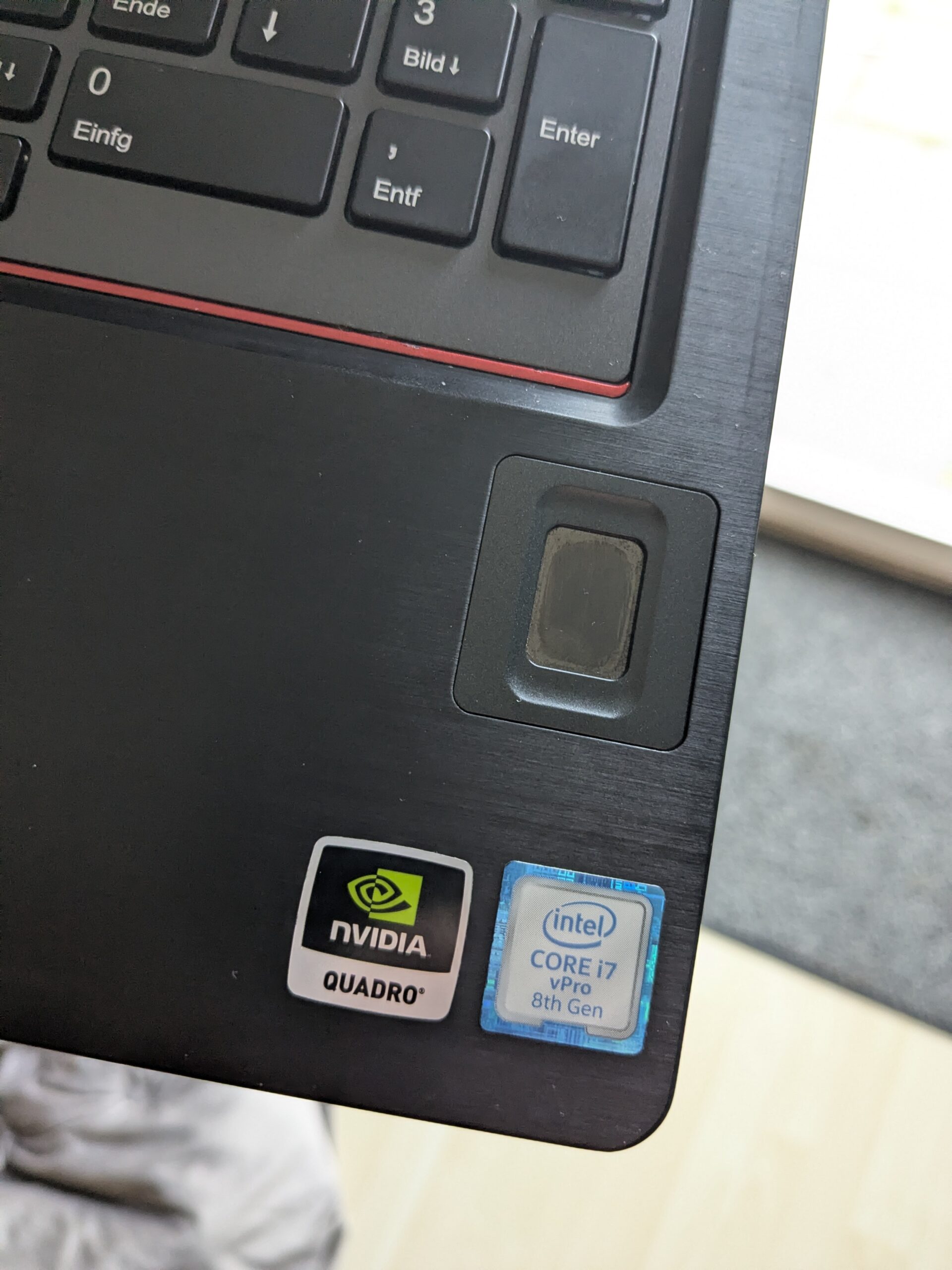
In meinem Fujitsu Notebook steckt ein Fingerabdruckleser. Ein NEXT Biometrics NB-2020-U, USB ID 298d:2020. Unter Windows funktioniert er, unter Linux nicht. Kein Treiber, kein Support, nichts. Das Gerät taucht in lsusb auf, wird aber von keinem Treiber erkannt. Im libfprint Wiki steht es auf der Liste der nicht unterstützten Geräte. Dort steht es schon eine Weile.
Das hat mich gestört.
libfprint kennt den NB-1010-U. Das ist ein externer USB Fingerabdruckleser von NEXT Biometrics, der seit einiger Zeit einen funktionierenden Treiber hat. Der NB-2020-U ist die eingebettete Variante desselben Sensors, gedacht für den Einbau in Notebooks. Wenn man sich Teardown Reports ansieht, etwa von System Plus Consulting oder Yole Group, dann stellt man fest: Beide Geräte verwenden den identischen Sensor Die. Gleiche Technik, anderes Gehäuse.
Das war der erste Anhaltspunkt. Wenn die Hardware gleich ist, sollte auch das USB Protokoll gleich sein. Und wenn das Protokoll gleich ist, sollte der vorhandene Treiber funktionieren.
Bevor ich aber einfach auf Verdacht losprogrammiert habe, wollte ich es absichern. Ich habe NEXT Biometrics direkt angeschrieben. Kevin Hung, Director FAE bei NEXT Biometrics, hatte mir bereits 2022 auf eine Anfrage zu Linux Treibern geantwortet. Damals war sein Vorschlag, über Fujitsu zu gehen. Das führte ins Leere. Diesmal habe ich konkret angeboten, selbst einen libfprint Treiber zu schreiben, und um das SDK gebeten.
Kevin hat mir daraufhin das NBBiometrics ANF SDK 3.0.0.1384 zugeschickt. Ein komplettes SDK mit Headern, Bibliotheken, Beispielcode und Dokumentation. Das war sehr hilfreich, denn die Header bestätigen einiges. Das SDK nutzt eine einzige Shared Library libNBBiometrics.so für alle Gerätetypen. Der NB-1010-U hat den internen Gerätetyp 200, der NB-2020-U den Typ 202. Beide verwenden dasselbe Scanformat: 180×256 Pixel bei 385 DPI. Die USB Vendor ID ist bei beiden 0x298d, nur die Product ID unterscheidet sich: 0x1010 beim einen, 0x2020 beim anderen.
Wichtig: Das SDK ist proprietär. Für den eigentlichen Treiber habe ich keinen Code daraus verwendet. libfprint akzeptiert nur sauberen, eigenständig entwickelten Code. Das SDK diente ausschließlich als Referenz, um die Protokollkompatibilität zu bestätigen.
Also habe ich es einfach ausprobiert. Den bestehenden nb1010.c Treiber genommen, die USB Product ID 0x2020 zur id_table hinzugefügt und gebaut. Dann auf dem Fujitsu Notebook getestet.
Es funktionierte sofort.
Geräteerkennung, USB Interface Claim, die State Machine für die Fingererkennung, alles lief auf Anhieb. fprintd-enroll hat Fingerabdrücke aufgenommen, fprintd-verify hat sie korrekt verifiziert. Der bestehende Treibercode brauchte keinerlei Anpassungen. Null. Nur die PID in der Tabelle und den Gerätenamen.
Ein Blick auf die USB Deskriptoren bestätigt das Bild. Der NB-2020-U hat exakt dasselbe Endpoint Layout wie der NB-1010-U: Bulk OUT auf Endpoint 0x02, Bulk IN auf Endpoint 0x83. Dazu kommt ein Interrupt Endpoint auf 0x81, den der Treiber nicht verwendet. Die Kommunikation läuft identisch ab.
Der Patch selbst ist entsprechend klein. Drei Dateien, drei Zeilen rein, drei Zeilen raus:
libfprint/drivers/nb1010.c: Die neue PID 0x2020 wird in die id_table eingetragen und der full_name auf "NextBiometrics NB-1010-U/NB-2020-U" erweitert.
data/autosuspend.hwdb: Der Eintrag 298d:2020 wird von der Liste der nicht unterstützten Geräte in die Sektion des nb1010 Treibers verschoben.
libfprint/fprint-list-udev-hwdb.c: Der Eintrag wird aus der Allowlist der nicht unterstützten Geräte entfernt, da er jetzt vom Treiber abgedeckt wird.
Den Merge Request habe ich bei libfprint upstream eingereicht: MR !569. Die CI Pipeline läuft durch, alle 124 Tests bestehen. Jetzt heißt es warten auf das Review durch die Maintainer.
Update, Juli 2026: Das Warten ist vorbei. MR !569 ist am 2. Juli 2026 upstream gemergt. Maintainer Marco Trevisan hat den Patch auf den aktuellen master rebased und per Auto-Merge aufgenommen, ohne blockierende Review-Kommentare. Der NB-2020-U wird damit ab der nächsten libfprint Version out of the box unterstützt. Die Details stehen im kurzen Nachtrag zum Merge.
Für alle, die denselben Fingerabdruckleser in ihrem Notebook haben: Sobald der Patch gemergt und in einer neuen libfprint Version enthalten ist, funktioniert der Sensor out of the box. Enrollment und Verifikation über fprintd laufen sauber. Wer nicht warten möchte, kann den Patch auch jetzt schon selbst auf ein aktuelles libfprint anwenden.
Im selben Fujitsu Notebook meiner Tochter steckt ein NB-2033-U, ein weiterer Fingerabdruckleser aus der gleichen Familie. Der verwendet allerdings ein komplett anderes Protokoll und ließ sich nicht einfach mit dem nb1010 Treiber ansprechen. Den habe ich per Reverse Engineering geknackt.
Das hier ist zugleich der Auftakt einer kleinen Beitragsserie unter dem Titel „Was hast du in deiner Elektronikwerkstatt?“. Vor allem nach dem Beitrag zur FritzBox wurde diese Frage mehrfach an mich herangetragen.
Um gleich Klarheit zu schaffen: Von einer „Elektronikwerkstatt“ kann bei mir keine Rede sein. Was du hier siehst, ist meine kleine „Healing-Bench“, ganz sicher keine vollwertige Werkstatt und ohne entsprechenden Anspruch. Ich repariere und bastle Elektronik aus reinem Hobby, und man kann sich daran vermutlich nicht unbedingt ein Beispiel nehmen. Aber hey, ihr habt gefragt und ich hab was zu erzählen.
Mein Werkzeug soll eins sein: funktionieren. Ich will mich nicht darüber ärgern, es soll mich nicht umbringen und bitte auch nicht die Welt kosten. Ja, vieles davon stammt tatsächlich von AliExpress.
USB-Kabeltester: mein Einstieg
Heute stelle ich dir einen USB-Kabeltester vor. Mittlerweile kommt fast jedes Gerät mit einem USB-Kabel, zum Laden oder für den Datenaustausch. Besonders mit USB-C hat sich die Vielfalt der Kabelstandards enorm vergrößert. Ich meine damit nicht nur Lade-Standards, Spannungen und Leistungen, sondern auch verschiedene Datenübertragungsmodi.
Früher, zu Zeiten von USB-A/B, war das noch eindeutig: Ein Kabel konnte so ziemlich alles, Laden oder Daten. Mit Micro-USB begann dann der Wandel: Viele Kabel taugen nur noch zum Laden und übertragen keine Daten mehr.
So oder so hast du sicher auch so eine Schublade zuhause, in der sich unzählige USB-Kabel sammeln. Ständig ziehst du eins heraus und fragst dich: „Kannst du Daten übertragen?“ Das Kabel schweigt. Und bei seltsamem Verhalten fragt man sich: „Hast du einen Kabelbruch?“ Auch hier bleibt das Kabel stumm.
Praktische Hilfe für den Alltag
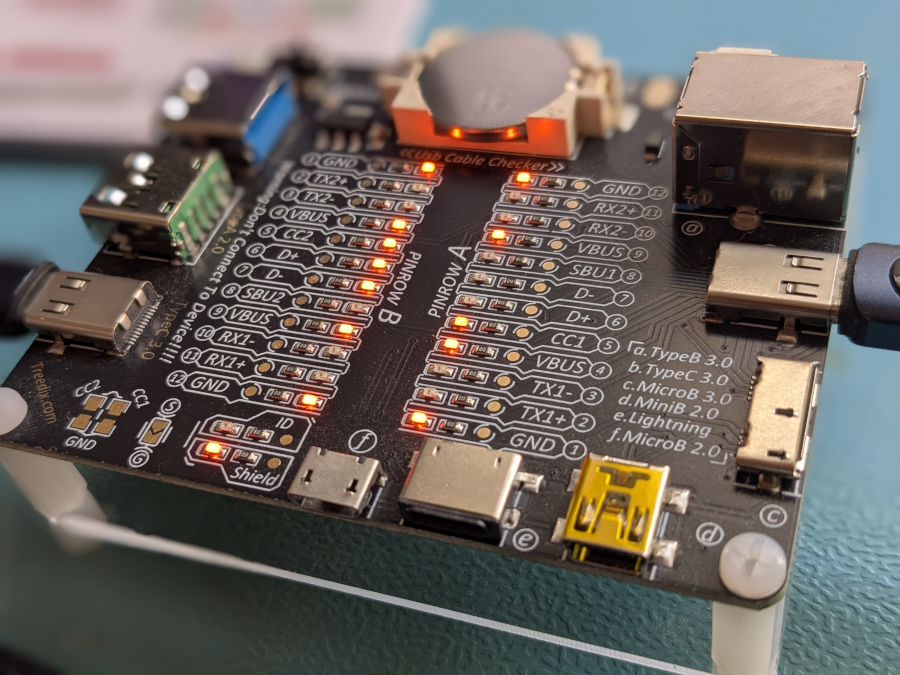
Hier kommt der USB-Kabeltester ins Spiel: Unter 10 €, betrieben mit einer einzigen CR2032-Knopfzelle, und er passt praktisch auf jede USB-Variante, selbst Lightning.
Beide Kabelenden einstecken, Gerät einschalten, und die beschrifteten LEDs zeigen sofort, welche Leitungen im Kabel verbunden sind. Oder auch nicht. Wer einen Kabelbruch sucht, wackelt einfach am Kabel. Wenn eine LED ausgeht, ist der Fehler gefunden. Das Ergebnis wird nicht durch irgendwelche Kondensatoren verfälscht.
Im Lieferumfang ist auch ein kleines, verständliches Handbuch enthalten: Es erklärt übersichtlich, welche Pins und Adern wo liegen und welche Funktion sie jeweils haben.
Fazit
Mit dem USB-Kabeltester machst du dir den Alltag deutlich leichter. Schnelle Kontrolle, einfache Bedienung, preiswert und super praktisch. Perfekt für alle, die einfach Ergebnisse wollen, ohne viel Aufwand.
Die QIVICON Home Base vom Telekom SmartHome kann keine Firmware-Updates auf die HomeMatic-Geräte von eQ-3 aufspielen. Bei den älteren HomeMatic-Geräten war das kein Problem, Updates waren selten und betrafen keine kritischen Funktionen. Bei den neueren HomeMatic IP Geräten sieht das anders aus. Die Firmware ändert sich regelmäßig, neue Funktionen kommen dazu und Bugs werden behoben. Ein Zwischenstecker fungiert zum Beispiel erst ab einem bestimmten Firmwarestand als Repeater im Mesh-Netzwerk.
Der Update-Weg über die CCU2
Zum Updaten gibt es zwei Möglichkeiten: Einen Funk-Konfigurationsstick für USB oder die CCU2 Zentrale von eQ-3. Ich habe mir die CCU2 besorgt. Der Ablauf pro Gerät sieht so aus:
1. Gerät vom Telekom SmartHome ablernen
2. Gerät an der CCU2 anlernen
3. Firmware-Update durchführen
4. Gerät von der CCU2 ablernen
5. Gerät am Telekom SmartHome wieder anlernen
Das ist aufwendig. Für jedes einzelne Gerät. Und bei den HomeMatic IP Geräten dauert ein Firmware-Update zwischen 8 und 42 Stunden. Die Firmware ist dabei knapp über 100 KB groß. Bei den älteren HomeMatic-Geräten ist das gleiche Update in fünf Minuten erledigt. Warum der Funkweg bei den IP-Geräten so langsam ist, erschließt sich mir nicht.
Warum nicht gleich die CCU2?
Das Telekom SmartHome hat einen Vorteil der schwer wiegt: Man kann Geräte verschiedener Hersteller miteinander kombinieren. HomeMatic, Philips Hue, Schellenberg Rolladen, DECT-Steckdosen. Das können die reinen eQ-3 Lösungen wie CCU2 mit Orbylon oder pocket control nicht in dem Umfang. Dafür nimmt man den umständlichen Firmware-Update-Prozess in Kauf.
Für ausführliche Storage-Benchmarks gibt es Tools wie bonnie++ oder fio. Wenn man nur schnell die Read- oder Write-Latency eines Dateisystems prüfen will, reicht ioping — ein einzelner Befehl, Ergebnis in Sekunden.
ioping -s 256k -T 120 -D -c 20 ./
256 KiB <<< ./ (zfs tanksmeer/usr/home): request=1 time=16.0 us (warmup)
256 KiB <<< ./ (zfs tanksmeer/usr/home): request=2 time=35.7 us
256 KiB <<< ./ (zfs tanksmeer/usr/home): request=3 time=45.8 us
...
--- ./ (zfs tanksmeer/usr/home) ioping statistics ---
19 requests completed in 853.7 us, 4.75 MiB read, 22.3 k iops, 5.43 GiB/s
generated 20 requests in 19.0 s, 5 MiB, 1 iops, 269.2 KiB/s
min/avg/max/mdev = 35.7 us / 44.9 us / 52.8 us / 3.85 us
Die Parameter im Detail:
-s 256k — Blockgröße pro Request (hier 256 KiB)
-T 120 — Timeout in Sekunden, Requests die länger brauchen werden ignoriert
-D — Direct I/O, umgeht den Kernel-Cache (misst die echte Disk-Latency)
-c 20 — Anzahl der Requests
./ — Pfad zum Dateisystem das gemessen werden soll
Die Summary am Ende zeigt min/avg/max/mdev — genau wie bei ping. Hier: durchschnittlich 44,9 µs Read-Latency auf einem ZFS-Dataset.
Write-Latency messen
Für die Write-Latency kommt ein einziger Parameter dazu — -W:
ioping -s 256k -T 120 -D -W -c 20 ./
256 KiB >>> ./ (zfs tanksmeer/usr/home): request=1 time=27.0 us (warmup)
256 KiB >>> ./ (zfs tanksmeer/usr/home): request=2 time=54.4 us
256 KiB >>> ./ (zfs tanksmeer/usr/home): request=3 time=60.6 us
...
--- ./ (zfs tanksmeer/usr/home) ioping statistics ---
19 requests completed in 3.86 ms, 4.75 MiB written, 4.93 k iops, 1.20 GiB/s
generated 20 requests in 19.0 s, 5 MiB, 1 iops, 269.5 KiB/s
min/avg/max/mdev = 51.6 us / 202.9 us / 2.65 ms / 577.9 us
Write ist hier erwartungsgemäß langsamer — 202,9 µs im Schnitt gegenüber 44,9 µs beim Lesen. Die höhere Standardabweichung (577,9 µs vs. 3,85 µs) zeigt, dass einzelne Writes deutlich länger dauern können (hier ein Ausreißer mit 2,65 ms — vermutlich ein ZFS Transaction Group Commit).
Weitere nützliche Optionen
# Fortlaufend messen (wie ping ohne -c)
ioping -D ./
# Nur die Summary nach 10 Requests
ioping -D -c 10 -q ./
# Bestimmte Blockgröße (4k für Random I/O)
ioping -s 4k -D -c 20 ./
# Netzlaufwerk / NFS-Mount testen
ioping -D -c 20 /mnt/nfs-share/
Praktisch für einen schnellen Vergleich: Lokale SSD, NFS-Share und USB-Platte mit dem gleichen Befehl messen — die Unterschiede werden sofort sichtbar. Fragen? Einfach melden.