Anfang März habe ich hier beschrieben, wie ich den NEXT Biometrics NB-2020-U in meinem Fujitsu Notebook unter Linux zum Laufen gebracht habe. Die ganze Arbeit lief am Ende auf eine einzige Product ID hinaus: 0x2020 im bestehenden nb1010 Treiber, weil der NB-2020-U denselben Sensor Die wie der NB-1010-U nutzt. Der Beitrag endete mit dem üblichen Cliffhanger: Merge Request eingereicht, CI grün, warten auf das Review durch die Maintainer.
Marco Trevisan, einer der libfprint Maintainer, hat den Patch auf den aktuellen master rebased, die Pipeline noch einmal durchlaufen lassen und ihn am 2. Juli 2026 per Auto-Merge aufgenommen (Commit 0fa670f). Blockierende Review-Kommentare gab es keine. Der Patch war klein und die Beweislage eindeutig: gleicher Sensor, gleiches USB Protokoll, gleicher Treiber, nur eine zusätzliche ID in der Tabelle.
Was das für Betroffene heißt
Für alle mit demselben Fingerabdruckleser im Notebook: Ab der nächsten libfprint Version wird der NB-2020-U out of the box erkannt. Kein eigener Patch mehr, kein Selberbauen. Enrollment und Verifikation über fprintd laufen dann direkt, sobald die Distribution die neue libfprint Version ausliefert. Wer nicht warten möchte, nimmt weiterhin den Patch aus dem ersten Beitrag oder baut direkt vom aktuellen master.
Der zweite Leser aus derselben Familie, der NB-2033-U mit seinem komplett eigenen Protokoll, hat einen eigenen Treiber von Grund auf bekommen. Dieser Merge Request !574 liegt noch beim Review, ist aber frisch auf den neuen master rebased und die Pipeline ist grün. Sobald auch der durch ist, folgt ein weiterer kurzer Nachtrag.
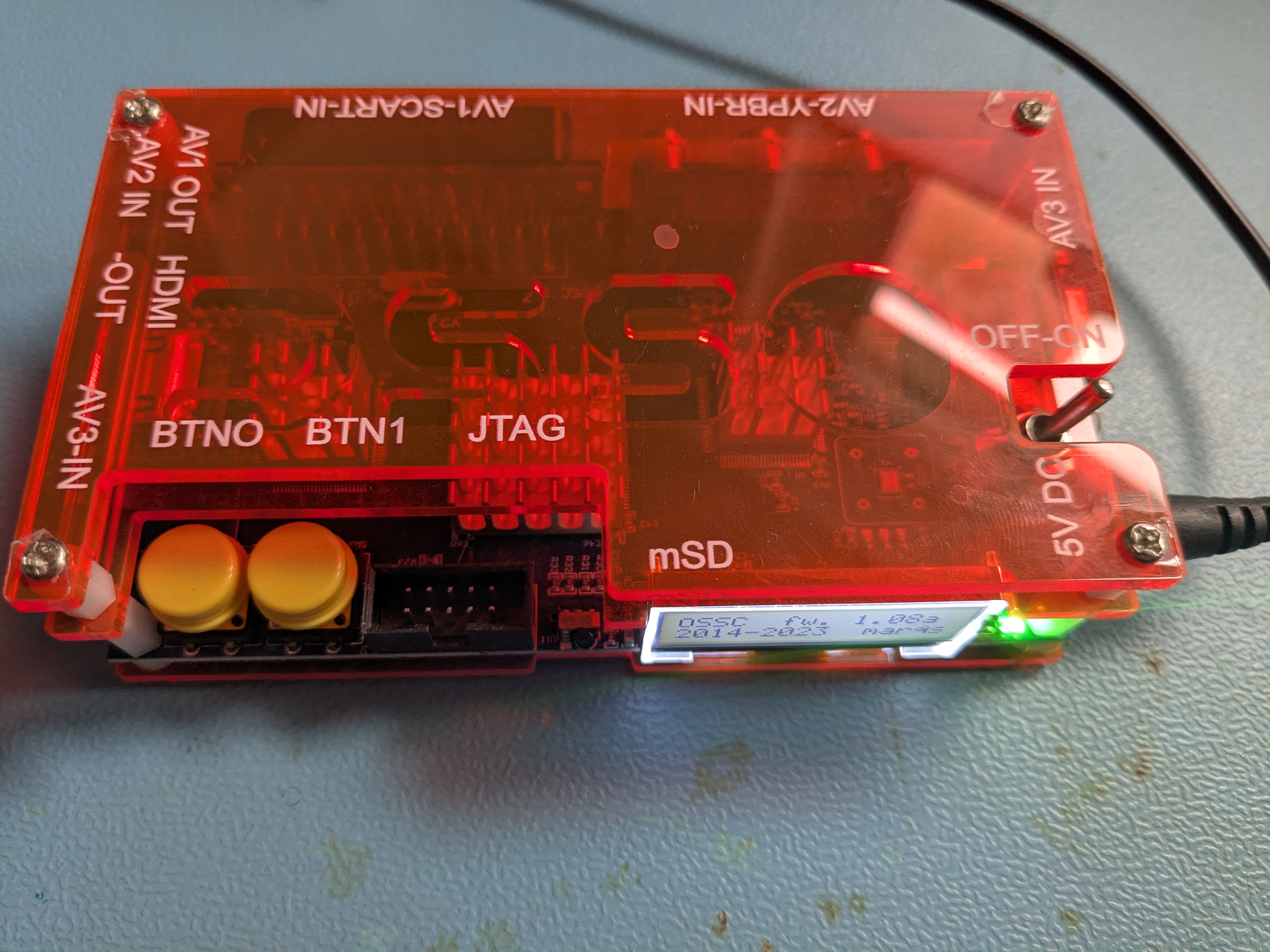
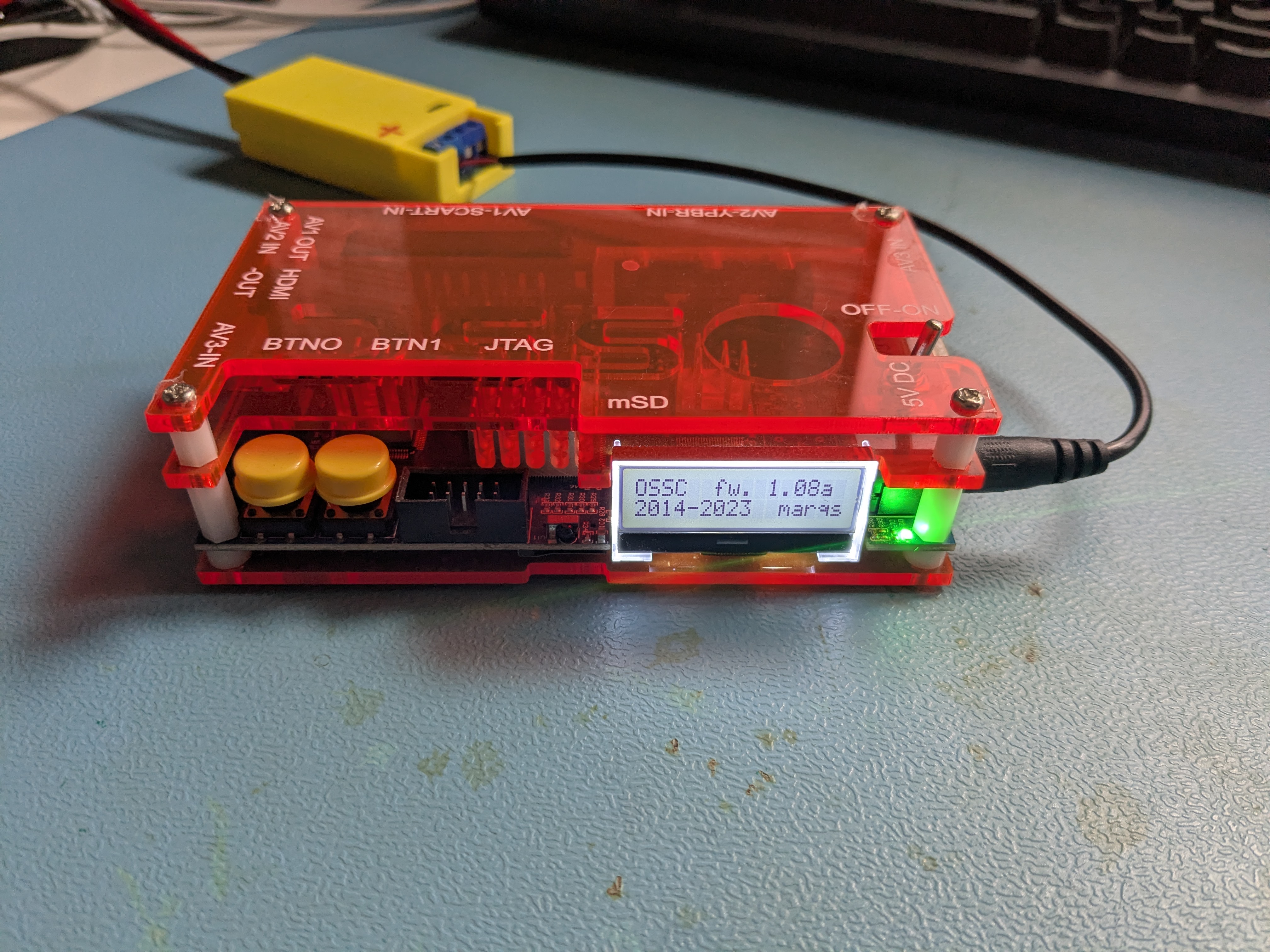
Auf dem LCD steht „OSSC fw. 1.08a, 2014-2023 marqs“. Wenn ich ehrlich bin: dieses Banner zeigt mir das Gerät seit Ewigkeiten, ich war einfach nie in der Stimmung das mal aufzuräumen. „Läuft ja“ hat sich da über die Jahre breit gemacht. Seit 1.08a sind inzwischen viele Releases erschienen, der Sprung von 1.10 bis 1.21 hat eine Menge mitgebracht: Lumacode, Shadow-Mask-Presets, ein komplett neu geschriebenes SD-Profil-Handling und ein Stück mehr Display-Kompatibilität. Und ab 1.20 funktioniert sogar das Update selbst endlich vernünftig. Also Zeit, das mal sauber durchzuziehen.
Wer den OSSC nicht kennt: kurz vorweg, warum das Teil bei mir seit Jahren auf dem Tisch liegt und nicht im Karton.
Was ist der OSSC eigentlich?
Der Open Source Scan Converter (OSSC) ist ein FPGA-basierter Line-Multiplier von Markus „marqs“ Hiienkari. Schaltpläne und Firmware liegen komplett offen auf github.com/marqs85/ossc. Auf dem Board sitzt ein Altera Cyclone IV, der analoges Video von Retro-Konsolen und Computern aufnimmt und digital per HDMI wieder ausspuckt. SNES, Mega Drive, N64, PS1/PS2, Saturn, Dreamcast, Amiga, Neo Geo, frühe PCs mit VGA, der C64 über entsprechende Adapter, alles was RGB, Component oder Composite/S-Video raushaut, kommt rein.
Der eigentliche Trick ist nicht das Skalieren an sich, sondern wie der OSSC skaliert. Er arbeitet Zeile für Zeile und benutzt keinen Frame-Buffer. Eine eingehende Scanline wird sofort mehrfach (Line2x, Line3x, Line4x, Line5x) ausgegeben, das war’s. Geräte wie der Framemeister scalen über einen kompletten Frame-Buffer und addieren dadurch im Worst Case einen ganzen Frame Latenz oder mehr. Der OSSC liegt im Bereich weniger Mikrosekunden plus den Pixel-Delay des Displays. Auf einem ordentlichen 1080p- oder 4K-Monitor sieht ein 240p-Konsolensignal damit pixelgenau scharf aus, und das ohne dass sich der Controller anfühlt als hätte er einen halben Sekundenschlaf eingelegt.
Pro Konsole lassen sich Sample-Modi und Custom-Profile abspeichern, dazu kommen optionale Scanline-Simulation und seit den neueren Firmwares Shadow-Mask-Presets, also so eine Art simulierter Lochmasken-Look wie auf einer alten Trinitron-Röhre. Mein Gerät ist eine Hardware-Revision v1.6 mit Audio-Support im roten Acrylgehäuse, also nehme ich die -aud-Variante der Firmware. Mehr dazu gleich beim Flashen.
Auf der Oberseite lesbar: AV1-SCART-IN für RGB-Signale per SCART, AV2-YPBR-IN für Komponenten-Video oder VGA über einen entsprechenden Adapter, AV3 IN als optionaler Composite/S-Video-Eingang. Daneben der HDMI-Out (DVI-kompatibel, mit Audio auf meiner Revision), zwei Taster BTN0 und BTN1 für Navigation ohne Fernbedienung, die JTAG-Pins für Bastler und der für den Update-Vorgang interessante mSD-Slot.
Wofür ich das Ding eigentlich benutze
Bei mir landet der OSSC immer dann auf dem Tisch, wenn alte Hardware an einen modernen Bildschirm soll und dabei auch noch sauber auf dem PC aufgezeichnet werden muss. HDMI raus aus dem OSSC, in einen USB-HDMI-Grabber rein, fertig ist die Aufnahme. Das geht eben nicht nur für die offensichtliche Schiene 386er oder Spielekonsole. Auch ein alter Videorecorder, eine analoge Kamera die ich für jemanden repariere oder einfach mal eben auslesen muss, eine 8-Bit-Maschine die plötzlich wieder einen Use-Case bekommt, all das geht über denselben Weg ins Bild. Mein guter alter C64 hängt mit ein paar Handgriffen am OSSC und ist sofort auf dem 27-Zoll-Monitor zu sehen, statt umständlich einen kleinen Röhrenmonitor aus dem Schrank zu wuchten.
Zwei Beispiele aus meinem YouTube-Kanal, beide via OSSC aufgenommen, damit man sich vorstellen kann was am Ende rauskommt:
Was sich seit 1.08a getan hat
Zwischen meiner alten 1.08a und der aktuellen 1.21 hat marqs in mehreren Releases einiges nachgelegt. Die spannendsten Punkte aus den offiziellen Release-Notes in der Reihenfolge wie sie aufgetaucht sind:
1.10: Erste Lumacode-Unterstützung, HDMI-VRR-Flag, reduzierter Sampling-Jitter in den Optimized-Modes, MSX-Sync-Erkennung gefixt, neue High- und Optimal-Sampling-Raten für Passthru.
1.11: Lumacode auch für NES, 480p/576p im Line3x-Modus, Settings-Export wieder eingebaut, neue Display-Kompatibilitätsoptionen (ADC-/FPGA-PLL-Bandbreite, HPLL2x-Controls).
1.12: Lumacode auf Atari GTIA und VCS erweitert, HDR-Infoframe-Wiederholung gefixt, Default-ADC-PLL-Bandbreite reduziert für mehr Display-Kompatibilität, Full-VSYNC-Bypass für MDA-Karten.
1.20: Volle FAT32/exFAT-Unterstützung für die SD-Karte, neues Profil-Format mit deutlich verbesserter Kompatibilität zwischen Firmware-Versionen, Shadow-Mask- und Lumacode-Presets laden und speichern direkt von SD, OSD-Cursor-Farbe wählbar, DIY-Latency-Tester und Panasonic-Hack wieder verfügbar, alternativer Firmware-Slot im internen Flash, 480p/576p-Pillarbox-Option für Widescreen-Displays ohne Aspect-Ratio-Control.
1.21: Lumacode-Support finalisiert, Profil-Speichern und -Laden über SD gefixt.
Für mich relevant: das neue SD-Profil-Handling und die paar Display-Kompatibilitätsschrauben. Lumacode ist eine andere Geschichte (ein Trick um Composite-only-Konsolen wie NES oder Atari VCS auf Luma-Ebene farbgetrennt einzulesen, dafür brauche ich aber spezielle Lumacode-Kabel und passe heute eher).
Pre-1.20 heißt: dd, nicht copy
Hier ist der Knackpunkt, an dem viele beim Update straucheln. Der Bootloader auf dem OSSC erwartet die Firmware ab Sektor 0 der microSD, also als rohes Disk-Image. Eine FAT32-Partition mit der .bin drin reicht ihm nicht. Erst ab Version 1.20 wurde der Update-Mechanismus umgebaut, danach genügt der simple Datei-Copy in ein /fw/-Verzeichnis auf einer FAT32- oder exFAT-formatierten Karte. Wer wie ich von 1.08a kommt, muss diesen Schritt einmal mit dd machen, und ab dem nächsten Mal ist die SD-Karte dann nur noch ein Datenträger und kein Bootloader-Trick.
Heruntergeladen habe ich ossc_1.21-aud.bin direkt vom v1.21 Release. Die Datei ist 391 KB groß. marqs liefert in den Releases selbst keine Prüfsumme mit, also habe ich nach dem Download lokal eine SHA256 gezogen, damit ich beim Schreiben weiß dass die Datei nicht unterwegs verstümmelt wurde:
Dann auf die microSD. Eine beliebige Karte tut es, idealerweise eine kleine die man nicht für etwas Wichtiges braucht, das Image überschreibt eh den kompletten ersten Bereich. dd ist gnadenlos, einmal das falsche Device erwischt und die Systemplatte ist Vergangenheit. Also vorher mit lsblk oder dmesg | tail sicher feststellen, welches /dev/sdX die SD-Karte ist. Bei mir hier /dev/sdc, aber das ist auf jedem System ein anderes Ziel.
Kurzer Reminder, weil das hier wirklich wehtut wenn man es verbockt: das of= zeigt auf das ganze Device, nicht auf eine Partition. Also /dev/sdc, nicht /dev/sdc1. Und nicht die Systemplatte erwischen, ich weiß ja nicht ob ich das oft genug schreiben kann.
Am Gerät
Karte raus aus dem Card-Reader, rein in den mSD-Slot am OSSC. Gerät einschalten, mit der Fernbedienung (oder den beiden Tastern am Gehäuse) durch das Menü zu Settings → Fw. update und einmal bestätigen. Der OSSC liest das Image direkt von der microSD, schreibt es ins interne Flash und meldet nach ein paar Sekunden Erfolg. Danach aus, microSD raus, wieder an. Im Bootscreen steht jetzt brav „OSSC fw. 1.21“, und das alte „2014-2023“-Banner ist weg. Kein Drama, keine Fehler, einfach erledigt.
Eine Sache die in den Release-Notes explizit erwähnt wird und auf die man sich einstellen sollte: Profile und Settings sind zwischen Firmware-Versionen nicht garantiert kompatibel. Bei dem Sprung von 1.08a auf 1.21 erst recht nicht. Alles was an Custom-Sample-Phasen, Modi und Per-Console-Tweaks gespeichert war, muss einmal neu konfiguriert werden. Ab 1.20 ist das neue Profil-Format dann deutlich stabiler und überlebt zukünftige Sprünge eher, das war ja Teil des Cleanups in dem Release.
Ab 1.20 wird’s bequem
Das nächste Update bekomme ich jetzt geschenkt. Eine FAT32- oder exFAT-formatierte microSD, ein Ordner /fw/ im Root, die .bin reinkopiert, Karte in den Slot, im Menü das Update starten. Kein dd, kein „war das jetzt das richtige Device“, keine Karte die ich danach erst neu formatieren muss damit andere Geräte sie wieder anfassen. Das einmalige Holperstück dd war also nur weil ich so lange mit der alten Firmware unterwegs war. Wer schon auf 1.20 oder 1.21 ist, kommt nie wieder in die Verlegenheit.
Fazit
Der Aufwand für so ein Firmware-Update ist überschaubar, der Effekt aber spürbar. Ein paar weniger Display-Quirks, ein wirklich brauchbares Profil-Handling und das gute Gefühl dass das Gerät auf dem aktuellen Stand ist, das ein Hobby-Entwickler aus Finnland inzwischen über zehn Jahre pflegt. Open Source Hardware in der Praxis: ein einzelner Mensch, ein offenes Repository, ein FPGA und eine kleine Community von Retro-Enthusiasten die das Ding am Leben halten. Genau die Sorte Projekt, die ich gerne unterstütze, sei es nur indem ich auch mal Bug-Reports oder Erfahrungen rausschicke.
Wer selbst einen OSSC zu Hause hat und noch auf einer Firmware vor 1.20 ist, dem kann ich nur raten: einmal die saure dd-Pille schlucken und auf 1.21 hochziehen. Ab dann ist Updaten so langweilig wie Datei kopieren, und genau so soll es ja sein.
Im letzten Beitrag zum Thema hatte ich angekündigt, dass ich mir auch den NB-2033-U vornehmen will. Der steckt in einem zweiten Fujitsu Notebook hier, dem von meiner Tochter Maja. Gleicher Hersteller, gleiche Sensorfamilie, sollte ähnlich laufen wie beim NB-2020-U. Dachte ich.
Falsch gedacht.
Hersteller sagt: geht nicht
Ich hatte bei NEXT Biometrics nach Protokolldokumentation oder einem SDK für den NB-2033-U gefragt. Kevin Hung, Director FAE, antwortete freundlich aber eindeutig:
„Both 2020-U and 2033-U have different firmware and USB stack. The code flow (libusb) related to 2033-U and 2020-U is different. This could be the reason for 2033-U failure/unsupported in linux. As of now, it is not supported.“
Kein SDK, keine Doku, kein Support. Und 74 Einträge auf linux-hardware.org mit Status „failed“ für die USB ID 298d:2033. Weltweit kein Linux-Support für dieses Gerät.
Gut. Dann eben Reverse Engineering.
Erster Versuch: Windows-Treiber belauschen
Plan A war klassisch: Windows-Treiber in einer VM laufen lassen, USB-Traffic mitschneiden. VirtualBox installiert, USB-Passthrough konfiguriert, Windows gestartet. Der Fingerabdruckleser tauchte im Gerätemanager auf. Mit Code 31. Treiber konnte das Gerät nicht starten. Secure Boot hatte VirtualBox den Kernel-Treiber nicht signiert, und der USB-Passthrough war damit unbrauchbar.
Plan A verworfen.
Plan B: Das SDK direkt auf Linux
Das SDK von NEXT Biometrics (libNBBiometrics.so) unterstützt den NB-2033-U intern. Es kommuniziert direkt über libusb, ohne Kernel-Treiber. Das heißt: ich kann das SDK-Sample direkt auf dem Linux-Notebook laufen lassen und gleichzeitig den USB-Traffic mit usbmon mitschneiden.
Dafür musste Secure Boot deaktiviert werden. usbmon ist ein Kernel-Modul, und lockdown=integrity (von Secure Boot gesetzt) blockiert es auch für root. Secure Boot im BIOS aus, lockdown=none in GRUB, Neustart. Danach:
7654 Zeilen USB-Traffic. Das komplette Protokoll des NB-2033-U, aufgezeichnet während einer Enrollment-Session.
Was dabei rauskam
Das Protokoll ist komplett anders als beim NB-1010-U/NB-2020-U. Kevins Aussage stimmte. Hier die wesentlichen Unterschiede:
Eigenschaft
NB-1010-U / NB-2020-U
NB-2033-U
Bulk IN Endpoint
EP 3 (0x83)
EP 1 (0x81)
Kommandoformat
[0x80][CMD][SEQ][0x00]...
[CMD][0x00][LEN_LO][LEN_HI][PAYLOAD] (TLV)
Finger-Erkennung
Einzelnes 0x38
Zwei 0x0D Config + 0x38
Bildübertragung
90 Chunks à 540 Bytes
180 Chunks à 268 Bytes
Init
Einmal 0x07
Zweimal 0x07 nötig
Gleicher Sensor-Die (256×180 Pixel, 385 DPI, aktiv thermisch), aber ein komplett anderer USB-Stack. Der NB-2033-U nutzt ein TLV-Format (Type-Length-Value) statt des festen Kommandoschemas vom NB-1010-U. Jedes Kommando hat eine eigene Längenangabe, und die Antworten sind anders strukturiert.
Die Kommandos im Detail
Aus dem USB-Capture konnte ich sechs Kommandos identifizieren:
0x07 — Init/Wake. Muss zweimal gesendet werden, sonst reagiert der Sensor nicht.
0x0D — Sensor-Konfiguration. Wird zweimal vor jeder Finger-Erkennung gebraucht, um den „Enhanced“ Modus zu aktivieren.
0x38 — Finger-Erkennung. Byte 4 der Antwort ist der Detect-Level. Schwellwert 40.
Der Sensor misst Temperaturänderungen, nicht statischen Kontakt. Das klingt nach einem Detail, ist aber für die Treiber-Implementierung entscheidend. Finger auflegen erzeugt einen kurzen Spike im Detect-Wert (10 bis 50+). Finger bleibt liegen, und der Wert fällt zurück auf Basisniveau. Der Treiber muss also den Spike erkennen, nicht einen dauerhaften Zustand.
Dazu kommt: Nach dem Init gibt es transiente Spikes, die ungefähr 1,5 Sekunden brauchen, bis sie abklingen. Ohne Settle-Pause nach dem Init erkennt der Treiber Phantom-Finger.
Der Treiber
Rausgekommen ist nb2033.c, ein eigenständiger libfprint-Treiber mit rund 350 Zeilen. Kein proprietärer Code, keine SDK-Abhängigkeit. Das SDK diente nur als Referenz für die Capture-Analyse, der Treiber ist sauber von Grund auf geschrieben. Lizenz: LGPL 2.1+ wie alle libfprint-Treiber.
Der Merge Request ist eingereicht: MR !574 bei libfprint. Fünf Dateien: der neue Treiber, meson.build, autosuspend.hwdb und die Allowlist. CI läuft durch. Der verwandte MR !569 für den NB-2020-U ist noch in Review.
Für die Wiki-Aktualisierung (das Gerät von der „unsupported“ Liste nehmen) gibt es Issue #134.
Fazit
Der Hersteller sagt „not supported“, 74 Linux-User melden „failed“, und trotzdem war das an einem Nachmittag erledigt. SDK auf Linux ausführen, USB-Traffic mitschneiden, Protokoll rekonstruieren, Treiber schreiben, testen, upstream einreichen. Alles mit Open-Source-Tools: usbmon, libusb, libfprint.
Das Ergebnis: Majas Notebook hat jetzt einen funktionierenden Fingerabdruckleser unter Linux. Und sobald der Merge Request durch ist, haben ihn alle anderen auch.
Wir haben 2026. Alles wandert in die Cloud. Trotzdem will ich heute über serielle Konsolen schreiben. Klingt retro, ist es aber nicht. Wenn ein Switch sich verkonfiguriert hat und das Netzwerk weg ist, hilft kein Ansible und kein Dashboard in der Cloud. Dann hilft nur noch der serielle Konsolenport. Out-of-Band Management ist nicht tot. Es wurde nur teuer verpackt.
Kommerzielle Konsolenserver kosten gerne vierstellig. Oder man nimmt einen Raspberry Pi der noch herum liegt und auf eine neue Aufgabe wartet (ich habe hier ein paar Pi1 oder 2 herum liegen). Zusammen mit zwei USB Serial Adaptern hat man für unter 50 Euro einen Konsolenserver mit acht Ports. Das reicht für die meisten Setups locker aus.
Wofür ein Konsolenserver
Der klassische Fall: Ein paar Switches im Rack, jedes Gerät hat einen seriellen Konsolenport. Im Normalbetrieb konfiguriert man über das Netzwerk. Aber wenn mal eine falsche Route das Management Interface unerreichbar macht oder ein VLAN Umbau schiefgeht, steht man vor dem Gerät und steckt ein Kabel rein. Wenn das im DC in Frankfurt ist, oder vielleicht irgendwo in China, dann kann das spannend werden.
Oder man hat vorgebaut.
Ein Konsolenserver hängt permanent an den seriellen Ports der Netzwerkgeräte. Man kommt per SSH auf den Konsolenserver und von dort auf die serielle Konsole des Zielgeräts. Ob das Netzwerk funktioniert oder nicht, spielt keine Rolle mehr. Öhm also ja, so grob. Der Pi sollte dann ja schon noch erreichbar sein. Aber man hat ja in einem entfernten DC auch eine Dailin Line oder ähnliches, richtig? Richtig?
Hardware
Ein Raspberry Pi. Es muss kein aktuelles Modell sein. Selbst ein alter Pi 2 reicht völlig aus. Das Ding muss ser2net laufen lassen und ein paar serielle Ports bedienen, dafür braucht man keinen Quad Core mit 8 GB RAM. Der Pi aus der Schublade bekommt endlich eine sinnvolle Aufgabe.
FTDI Quad Port USB Serial Adapter (Vendor 0403, Product 6011). Pro Adapter bekommt man vier serielle Ports. Mit zwei Adaptern hat man acht Ports. Die Dinger gibt es für kleines Geld.
RS232 Kabel zu den Console Ports der Netzwerkgeräte. Welcher Stecker passt, hängt vom Hersteller ab. RJ45 auf DB9, DB9 auf DB9, die üblichen Verdächtigen. Da muss man schauen was die eigenen Geräte mitbringen.
Stabile Gerätenamen mit udev
Das erste Problem nach dem Einstecken der USB Adapter: Linux vergibt die /dev/ttyUSBx Nummern nach Lust und Laune. Nach einem Reboot kann ttyUSB0 plötzlich ttyUSB4 sein. Wenn man wissen will welcher Port an welchem Gerät hängt, ist das unpraktisch.
Die Lösung sind udev Regeln. Jeder FTDI Adapter hat eine eigene Seriennummer. Die findet man so:
udevadm info -a -n /dev/ttyUSB0 | grep serial
Damit baut man sich Regeln die stabile Symlinks erzeugen. Datei /etc/udev/rules.d/99-serial-consoles.rules:
FT000001 und FT000002 ersetzt man durch die echten Seriennummern der eigenen Adapter. Das Ergebnis sind stabile Symlinks: /dev/quad0-00 bis /dev/quad0-03 für den ersten Adapter, /dev/quad1-00 bis /dev/quad1-03 für den zweiten. Acht Ports, immer gleich benannt. Egal wie oft man den Pi neustartet.
ser2net
ser2net bildet die seriellen Ports auf TCP Ports ab. Man kann dann per Telnet auf einen bestimmten Port zugreifen und landet direkt auf der seriellen Konsole des zugehörigen Geräts. Installieren mit apt install ser2net, dann die Konfiguration in /etc/ser2net.conf:
9600 8N1 ist der Standard bei den meisten Netzwerkgeräten. Falls ein Gerät eine andere Baudrate braucht, passt man die entsprechende Zeile an. Der Timeout von 600 Sekunden trennt die Verbindung nach zehn Minuten Inaktivität. Das verhindert dass ein vergessenes Telnet die Konsole dauerhaft blockiert.
Direkter Zugriff mit minicom
Wer ser2net nicht nutzen will oder schnell direkt auf einen Port muss, nimmt minicom:
minicom -D /dev/quad0-00 -b 9600
minicom ist gut für schnelle Tests und Debugging. Für den Dauerbetrieb mit mehreren Ports gleichzeitig ist ser2net die bessere Wahl.
Warum localhost
ser2net ist im gezeigten Setup bewusst auf localhost gebunden. Man muss sich erst per SSH auf den Pi einloggen und dann telnet 127.0.0.1 200x aufrufen. Das ist Absicht.
Man könnte ser2net auch auf 0.0.0.0 binden und die Ports direkt aus dem Netz erreichen. Davon rate ich ab. Telnet ist unverschlüsselt. Auch in einem Management VLAN hat das nichts verloren.
Bessere Alternativen wenn man ohne SSH auf den Pi will:
ser2net ab Version 4.x unterstützt SSL/TLS. Damit hat man verschlüsselte Verbindungen direkt zu den Console Ports.
stunnel vor ser2net schalten. stunnel terminiert TLS und reicht die Verbindung an den lokalen ser2net weiter.
Wer nativen SSH Zugriff direkt auf die seriellen Ports braucht, sollte sich conserver anschauen. ser2net kann kein SSH.
Für die meisten Setups ist SSH auf den Pi und dann Telnet auf localhost der einfachste und sicherste Weg.
Absichern
Ein paar Dinge die man auf dem Pi noch machen sollte:
Den Default Benutzer pi löschen. Einen eigenen Benutzer anlegen. SSH Key Authentifizierung einrichten und Login per Passwort deaktivieren. Das ist nicht optional.
NTP konfigurieren. Timestamps in Logs sind nutzlos wenn die Uhrzeit nicht stimmt.
Syslog an einen zentralen Logserver weiterleiten. Wenn man serielle Konsolen mitschneidet, will man die Logs nicht nur lokal auf dem Pi haben.
Workflow
Der Alltag sieht dann so aus:
SSH auf den Pi: ssh admin@10.0.0.50
Telnet auf den gewünschten Port: telnet 127.0.0.1 2003
Man landet auf der seriellen Konsole von Switch 3
Alternativ direkt mit minicom: minicom -D /dev/quad0-02 -b 9600
Zum Trennen: Ctrl-] und dann quit bei Telnet. Ctrl-A gefolgt von X bei minicom.
Fazit
Ein alter Raspberry Pi, zwei USB Adapter, ein paar Kabel. Mehr braucht man nicht für einen funktionierenden Konsolenserver mit acht Ports. Die Einrichtung dauert vielleicht eine Stunde. Danach läuft das Ding und man muss nie wieder ein Konsolenkabel quer durch den Serverraum schleppen.
Und der alte Pi aus der Schublade hat endlich wieder eine Aufgabe.
Ihr habt Fragen, Anmerkungen oder baut das Setup selbst nach? Meldet euch gerne über die Kontaktseite oder direkt per E-Mail.
Ich hatte noch einen Quantis USB in der Schublade liegen. Einen Hardware-Quantenzufallsgenerator von ID Quantique aus Genf. Ein Gerät, das echten Zufall erzeugt. Nicht pseudo, nicht algorithmisch, nicht „irgendwie aus Interrupts zusammengewürfelt“, sondern auf Basis von Quantenphysik. Fundamental unvorhersagbar.
Nachdem ich in den letzten Beiträgen OpenSSH und Postfix/Dovecot mit Post-Quantum-Kryptografie abgesichert habe, fiel mir wieder ein: PQC schützt die Algorithmen vor Quantencomputern. Schön und gut. Aber was ist eigentlich mit der Zufallsquelle, die diese Algorithmen füttert? Zeit, das Teil mal wieder anzuschließen und zu schauen, was es taugt.
Was steckt in dem Gerät?
Der Quantis USB von ID Quantique ist ein sogenannter Quantum Random Number Generator, kurz QRNG. Das Prinzip dahinter: Ein Photonendetektor misst quantenoptisches Vakuumrauschen. Das sind Fluktuationen im elektromagnetischen Feld, die nach den Gesetzen der Quantenmechanik fundamental zufällig sind. Nicht „fast zufällig“ oder „praktisch zufällig“, sondern physikalisch beweisbar unvorhersagbar. Das ist ein wichtiger Unterschied zu allem, was ein Algorithmus je leisten kann. Dazu gleich mehr.
Das Gerät selbst ist fast schon enttäuschend simpel. USB 2.0 High-Speed, ein einziger Bulk-IN-Endpoint (0x86), 512 Bytes pro Read, rund 4 Mbit/s Durchsatz. Flashbare Firmware gibt es nicht. Die „Intelligenz“ steckt in der Optik und einem FPGA, nicht in Software. Das Ding macht genau eine Sache, und die macht es gut.
Mein Testgerät hat die Seriennummer 132244A410. Der Quantis USB ist inzwischen ein Legacy-Produkt, ID Quantique hat einen Nachfolger mit höherem Durchsatz im Programm. Einen öffentlichen Preis hatte das Gerät nie. „Request a Quote“, wie das bei Nischenprodukten mit Zertifizierungsanforderungen so üblich ist. Das Gerät ist METAS-zertifiziert und war für Kunden gedacht, die Common-Criteria-Anforderungen erfüllen müssen. Vergleichbare QRNGs bewegen sich im Bereich von 900 bis 2.000 Euro. Nicht gerade ein Impulskauf.
Einrichten unter Linux
Angeschlossen an mein Linux Mint 22.3 (Ubuntu 24.04 Basis) meldet sich das Gerät sofort im Kernel-Log:
$ dmesg | tail
usb 1-1: New USB device found, idVendor=0aba, idProduct=0102
usb 1-1: Product: Quantis USB
usb 1-1: Manufacturer: id Quantique
usb 1-1: SerialNumber: 132244A410
Kein spezieller Treiber nötig. Das ist ein generisches USB-Bulk-Device, der Kernel erkennt es und das war’s. Die proprietäre libquantis von ID Quantique kann man sich komplett sparen. Man kann direkt mit pyusb auf den Endpoint zugreifen. So mag ich das.
Damit das auch ohne Root funktioniert, legt man eine udev-Regel an:
$ sudo udevadm control --reload-rules && sudo udevadm trigger
Gerät abstecken, wieder anstecken, fertig. Ab jetzt kann jeder Benutzer in der Gruppe plugdev auf das Gerät zugreifen.
Daten lesen mit Python
Zum Auslesen reicht das Paket python3-usb (pyusb). Installieren via apt install python3-usb, falls nicht vorhanden. Dann braucht man erstaunlich wenig Code:
Das ist alles. USB öffnen, Configuration setzen, den einen IN-Endpoint finden, 512 Bytes lesen. Fertig. Kein SDK, keine Bibliothek, kein Account, kein Cloud-Dienst. USB rein, Bytes raus.
Wichtig: Immer volle 512-Byte-Blöcke lesen (wMaxPacketSize). Wer weniger anfordert, bekommt USB-Overflow-Fehler. Das Gerät kennt keine halben Sachen. Es produziert kontinuierlich Zufallsdaten und schiebt sie in den USB-Puffer. Die müssen abgeholt werden, so wie sie kommen.
Für den Test habe ich das Ganze in eine Schleife gepackt und 100.000 Bytes gesammelt. Parallel dazu 100.000 Bytes aus /dev/urandom. Beide Datensätze dann durch dieselben statistischen Tests gejagt.
Der Test: Quantis vs. /dev/urandom
Jetzt wird’s spannend. Wie gut ist echter Quantenzufall im Vergleich zum Software-PRNG des Linux-Kernels?
Spoiler: Statistisch seht ihr keinen Unterschied. Und genau das ist der Punkt.
Metrik
Quantis USB
/dev/urandom
Shannon-Entropie
7,998513 Bits/Byte
7,998077 Bits/Byte
Maximum (theoretisch)
8,000000
8,000000
Effizienz
99,9814 %
99,9760 %
Chi² (Byte-Verteilung)
205,8
267,3
Erwartet (Chi²)
~255 ± 23
~255 ± 23
Bit-Balance (Anteil Einsen)
49,975 %
50,018 %
Serielle Korrelation
+0,001230
+0,003801
Längster Bit-Run (10 kB)
15 Bits
21 Bits
Erwarteter Run
~16
~16
Die Shannon-Entropie liegt bei beiden Quellen über 99,97 % des theoretischen Maximums von 8 Bit pro Byte. Das ist hervorragend. Die Chi²-Werte zeigen eine gleichmäßige Byte-Verteilung, beide liegen im erwarteten Bereich um 255. Die Bit-Balance ist nahezu perfekt bei 50/50, die serielle Korrelation praktisch null.
In den einfachen Tests schneidet der Quantis sogar minimal besser ab: niedrigere Korrelation, gleichmäßigere Verteilung, kürzerer maximaler Bit-Run. Aber ehrlich gesagt liegt das im statistischen Rauschen. Bei 100.000 Bytes Sample-Größe kann man keine belastbare Aussage über die Überlegenheit einer Quelle treffen. Man müsste Millionen oder Milliarden Bytes testen und Testsuiten wie die NIST SP 800-22 oder Dieharder durchlaufen lassen, um wirklich statistisch signifikante Unterschiede zu finden.
Heißt das, der Quantis ist überflüssig? Nein. Denn der Unterschied liegt nicht in der Statistik.
Wo liegt dann der echte Unterschied?
Die spannende Frage ist nicht, ob die Zahlen „zufälliger“ sind, sondern warum sie es sind.
/dev/urandom verwendet intern ChaCha20, einen deterministischen CSPRNG (Cryptographically Secure Pseudo-Random Number Generator). Der initiale Seed kommt aus der Kernel-Entropie: Hardware-Interrupts, Timing-Jitter, Geräte-Events, und seit einigen Jahren auch RDRAND/RDSEED aus der CPU, falls vorhanden. Das funktioniert in der Praxis hervorragend und ist extrem gut untersucht.
Aber es bleibt ein Algorithmus mit einem internen State. Wer diesen State kennt (und sei es nur theoretisch), kann alle zukünftigen Outputs berechnen. Das ist kein realistisches Angriffsszenario für euren Laptop. Aber es ist eine fundamentale Eigenschaft: Die Sicherheit von /dev/urandom basiert auf Berechnungsannahmen. Man nimmt an, dass ChaCha20 nicht effizient invertierbar ist. Stand heute stimmt das. Aber es ist eine Annahme, kein Beweis.
Der Quantis hingegen erzeugt Zufall aus Quantenvakuum-Fluktuationen. Da gibt es keinen Algorithmus, keinen State, keinen Seed. Die Unvorhersagbarkeit ist nicht durch die Komplexität eines Algorithmus geschützt, sondern durch die Gesetze der Quantenmechanik. Kein Angreifer, egal mit welcher Rechenleistung und egal mit wie viel Zeit, kann die nächsten Bits vorhersagen. Auch kein Quantencomputer. Das ist nicht berechnungstheoretisch sicher, sondern informationstheoretisch sicher. Die höchste Sicherheitskategorie, die es gibt.
Klingt akademisch? Zum Teil. Für den Alltag auf eurem Desktop oder Server reicht /dev/urandom völlig aus. Es gibt keinen bekannten praktischen Angriff darauf, und Linux‘ CSPRNG ist schnell, überall verfügbar und gut gewartet.
Aber es gibt Szenarien, in denen der Unterschied real zählt:
Erzeugung kryptografischer Schlüssel mit höchsten Sicherheitsanforderungen
Seeding von HSMs (Hardware Security Modules), die selbst keine eigene Entropiequelle haben
Regulatorische und Zertifizierungsanforderungen, also Common Criteria, FIPS-Validierung, BSI-Vorgaben
Wissenschaftliche Experimente, die physikalisch echten Zufall benötigen (z. B. Quantenoptik, Monte-Carlo-Simulationen)
Quantenschlüsselaustausch (QKD), ein Bereich in dem ID Quantique ebenfalls aktiv ist
Das größere Bild: QRNG und PQC
Post-Quantum Cryptography schützt kryptografische Algorithmen davor, von Quantencomputern gebrochen zu werden. ML-KEM für den Schlüsselaustausch, ML-DSA für Signaturen. Das ist die eine Seite der Medaille.
Die andere Seite ist die Zufallsquelle. Ein kryptografischer Algorithmus kann noch so quantensicher sein. Wenn der Zufall, mit dem Schlüssel erzeugt werden, vorhersagbar oder manipulierbar ist, hilft das alles nichts. Der Zufall ist das Fundament, auf dem alles andere aufbaut.
Ein QRNG schützt genau diesen Angriffsvektor. Beides zusammen, PQC-Algorithmen und eine quantenphysikalische Zufallsquelle, ergibt ein quantum-safe Gesamtsystem. Das ist heute für die meisten von uns Overkill. Aber die Bausteine existieren, sie sind verfügbar, und es schadet nicht zu wissen, wie sie funktionieren.
Übrigens: Wer jetzt denkt „dann stecke ich den Quantis in meinen Server und bin sicher“, der macht es sich zu einfach. Die Vertrauensfrage verschiebt sich nur. Woher weiß ich, dass das Gerät tatsächlich Quantenzufall liefert und nicht einfach einen internen PRNG hat? Bei einem zertifizierten Gerät wie dem Quantis gibt es dafür Prüfberichte. Aber Vertrauen in Hardware bleibt immer ein Thema. Das ist bei Intel RDRAND nicht anders.
Einbindung ins System
Für die Vollständigkeit: Der Quantis USB lässt sich über rng-tools (rngd) als zusätzliche Entropiequelle in den Kernel-Entropiepool einbinden. Für Server mit hohem Entropie-Bedarf, also TLS-Terminierung unter Last, Massenerzeugung von Schlüsseln oder VPN-Gateways, kann das sinnvoll sein.
Ich habe das auf meinem Desktop nicht gemacht. Brauche ich dort nicht. Aber die Möglichkeit steht im Raum, falls jemand von euch einen Quantis oder ein vergleichbares Gerät an einen Server hängen möchte.
Fazit
Ein alter Hardware-QRNG, ein USB-Port, ein paar Zeilen Python, und man hat echten Quantenzufall auf dem Tisch. Statistisch nicht unterscheidbar von /dev/urandom, aber fundamental anders in der Entstehung. Die Sicherheit kommt nicht aus einem Algorithmus, sondern aus der Physik. Informationstheoretisch statt berechnungstheoretisch. Ein Unterschied, der in den allermeisten Fällen keine praktische Rolle spielt. Aber ein verdammt eleganter.
Für euren Desktop braucht ihr das nicht. Aber verstehen, warum es existiert und wie es sich einordnet, gerade im Kontext von Post-Quantum-Kryptografie, das lohnt sich. Warum denke ich jetzt an CIA und MAD? ;-D
Wie haltet ihr es mit euren Zufallsquellen? Vertraut ihr blind auf /dev/urandom, oder habt ihr euch schon mal Gedanken über die Entropiequelle dahinter gemacht?
In meinem Fujitsu Notebook steckt ein Fingerabdruckleser. Ein NEXT Biometrics NB-2020-U, USB ID 298d:2020. Unter Windows funktioniert er, unter Linux nicht. Kein Treiber, kein Support, nichts. Das Gerät taucht in lsusb auf, wird aber von keinem Treiber erkannt. Im libfprint Wiki steht es auf der Liste der nicht unterstützten Geräte. Dort steht es schon eine Weile.
Das hat mich gestört.
libfprint kennt den NB-1010-U. Das ist ein externer USB Fingerabdruckleser von NEXT Biometrics, der seit einiger Zeit einen funktionierenden Treiber hat. Der NB-2020-U ist die eingebettete Variante desselben Sensors, gedacht für den Einbau in Notebooks. Wenn man sich Teardown Reports ansieht, etwa von System Plus Consulting oder Yole Group, dann stellt man fest: Beide Geräte verwenden den identischen Sensor Die. Gleiche Technik, anderes Gehäuse.
Das war der erste Anhaltspunkt. Wenn die Hardware gleich ist, sollte auch das USB Protokoll gleich sein. Und wenn das Protokoll gleich ist, sollte der vorhandene Treiber funktionieren.
Bevor ich aber einfach auf Verdacht losprogrammiert habe, wollte ich es absichern. Ich habe NEXT Biometrics direkt angeschrieben. Kevin Hung, Director FAE bei NEXT Biometrics, hatte mir bereits 2022 auf eine Anfrage zu Linux Treibern geantwortet. Damals war sein Vorschlag, über Fujitsu zu gehen. Das führte ins Leere. Diesmal habe ich konkret angeboten, selbst einen libfprint Treiber zu schreiben, und um das SDK gebeten.
Kevin hat mir daraufhin das NBBiometrics ANF SDK 3.0.0.1384 zugeschickt. Ein komplettes SDK mit Headern, Bibliotheken, Beispielcode und Dokumentation. Das war sehr hilfreich, denn die Header bestätigen einiges. Das SDK nutzt eine einzige Shared Library libNBBiometrics.so für alle Gerätetypen. Der NB-1010-U hat den internen Gerätetyp 200, der NB-2020-U den Typ 202. Beide verwenden dasselbe Scanformat: 180×256 Pixel bei 385 DPI. Die USB Vendor ID ist bei beiden 0x298d, nur die Product ID unterscheidet sich: 0x1010 beim einen, 0x2020 beim anderen.
Wichtig: Das SDK ist proprietär. Für den eigentlichen Treiber habe ich keinen Code daraus verwendet. libfprint akzeptiert nur sauberen, eigenständig entwickelten Code. Das SDK diente ausschließlich als Referenz, um die Protokollkompatibilität zu bestätigen.
Also habe ich es einfach ausprobiert. Den bestehenden nb1010.c Treiber genommen, die USB Product ID 0x2020 zur id_table hinzugefügt und gebaut. Dann auf dem Fujitsu Notebook getestet.
Es funktionierte sofort.
Geräteerkennung, USB Interface Claim, die State Machine für die Fingererkennung, alles lief auf Anhieb. fprintd-enroll hat Fingerabdrücke aufgenommen, fprintd-verify hat sie korrekt verifiziert. Der bestehende Treibercode brauchte keinerlei Anpassungen. Null. Nur die PID in der Tabelle und den Gerätenamen.
Ein Blick auf die USB Deskriptoren bestätigt das Bild. Der NB-2020-U hat exakt dasselbe Endpoint Layout wie der NB-1010-U: Bulk OUT auf Endpoint 0x02, Bulk IN auf Endpoint 0x83. Dazu kommt ein Interrupt Endpoint auf 0x81, den der Treiber nicht verwendet. Die Kommunikation läuft identisch ab.
Der Patch selbst ist entsprechend klein. Drei Dateien, drei Zeilen rein, drei Zeilen raus:
libfprint/drivers/nb1010.c: Die neue PID 0x2020 wird in die id_table eingetragen und der full_name auf "NextBiometrics NB-1010-U/NB-2020-U" erweitert.
data/autosuspend.hwdb: Der Eintrag 298d:2020 wird von der Liste der nicht unterstützten Geräte in die Sektion des nb1010 Treibers verschoben.
libfprint/fprint-list-udev-hwdb.c: Der Eintrag wird aus der Allowlist der nicht unterstützten Geräte entfernt, da er jetzt vom Treiber abgedeckt wird.
Den Merge Request habe ich bei libfprint upstream eingereicht: MR !569. Die CI Pipeline läuft durch, alle 124 Tests bestehen. Jetzt heißt es warten auf das Review durch die Maintainer.
Update, Juli 2026: Das Warten ist vorbei. MR !569 ist am 2. Juli 2026 upstream gemergt. Maintainer Marco Trevisan hat den Patch auf den aktuellen master rebased und per Auto-Merge aufgenommen, ohne blockierende Review-Kommentare. Der NB-2020-U wird damit ab der nächsten libfprint Version out of the box unterstützt. Die Details stehen im kurzen Nachtrag zum Merge.
Für alle, die denselben Fingerabdruckleser in ihrem Notebook haben: Sobald der Patch gemergt und in einer neuen libfprint Version enthalten ist, funktioniert der Sensor out of the box. Enrollment und Verifikation über fprintd laufen sauber. Wer nicht warten möchte, kann den Patch auch jetzt schon selbst auf ein aktuelles libfprint anwenden.
Im selben Fujitsu Notebook meiner Tochter steckt ein NB-2033-U, ein weiterer Fingerabdruckleser aus der gleichen Familie. Der verwendet allerdings ein komplett anderes Protokoll und ließ sich nicht einfach mit dem nb1010 Treiber ansprechen. Den habe ich per Reverse Engineering geknackt.
Seit gut zwei Jahren druckt bei mir ein QIDI i-Mate S. Damals gesucht: kompaktes Design, beheizbares Druckbett, geschlossener Druckraum, Druckbett nur in der Z-Achse, PLA/ABS/PETG. Gefunden, bestellt, seitdem im Einsatz.
Der Drucker tut, was er soll. Für den Preis in guter Qualität. Die Slicer-Software QIDI Print basiert auf Cura, ist aber speziell auf den Drucker angepasst. Soweit findet man das in jedem Testbericht. Was dort meistens fehlt: Infos zu Upgrades, dem Support und den kleinen Macken im Alltag.
Support
Der Support von QIDI war bisher durchgehend exzellent. Per E-Mail direkt an mateb@qd3dprinter.com kam immer innerhalb von 24 Stunden eine Antwort. Auch an Wochenenden und Feiertagen. Freundlich, hilfsbereit, mit Videos, Anleitungen und angepassten Konfigurationsdateien. Dateiaustausch lief unkompliziert über Google Drive. Wer schon einmal mit Herstellern hinter der chinesischen Firewall Daten austauschen wollte, versteht den Mehrwert.
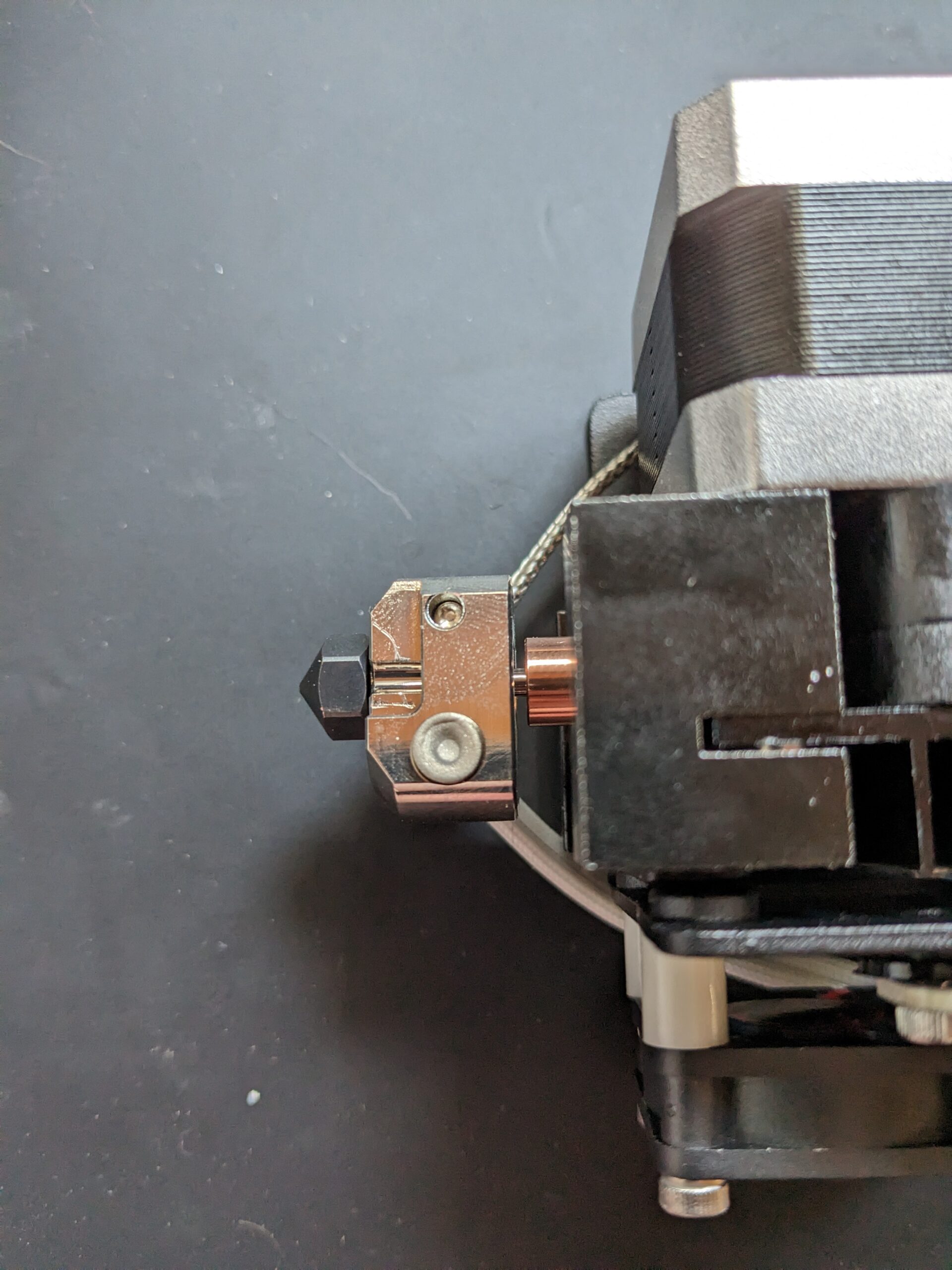
All-Metal Hotend
Nach knapp einem Jahr kam das erste Upgrade: ein Full-Metal Extruder von AliExpress. Das passende Firmware-Update gab es direkt vom Support inklusive Anleitung. Einbau war einfach, besondere Einstellungsänderungen in QIDI Print nicht nötig.
Mit dem neuen Druckkopf war die Layerhaftung zunächst schlechter. Der Support half: Nicht jeder Schrittmotor läuft exakt gleich. Bei 2 cm Filamentvorschub kamen bei mir keine 2 cm. Drei E-Mails und 15 Minuten später hatte ich eine angepasste Konfigurationsdatei. Einfach „gedruckt“ und das Problem war Geschichte.
Schrittmotor-Kühlung
Die Schrittmotoren werden beim Druck spürbar warm. Nicht zu warm, aber warm genug, dass ich dem Drang nicht widerstehen konnte. Selbstklebende Kühlkörper von AliExpress auf alle Achsen-Motoren. Den Druckkopf-Motor ausgenommen, der wird bereits aktiv gekühlt und das zusätzliche Gewicht wäre kontraproduktiv.
Wer die passive Kühlung direkt aktiv machen will: Es gibt passende 24V-Lüfter dafür.
Filament Sensor
Filament bricht selten, aber es passiert. Oder es ist mitten im Druck leer und der Drucker läuft einfach weiter. Ein Filament Run Sensor von AliExpress erkennt das und stoppt den Druckvorgang. Filament nachladen, weitermachen.
Installation wieder einfach, wieder mit Anleitung vom Support und einer Konfigurationsdatei zum „Drucken“. Kleines Detail am Rande: In der deutschen Übersetzung der Firmware heißt der Filament Sensor „Glühfaden-Sensor“. Der Support hat sich über den Hinweis gefreut.
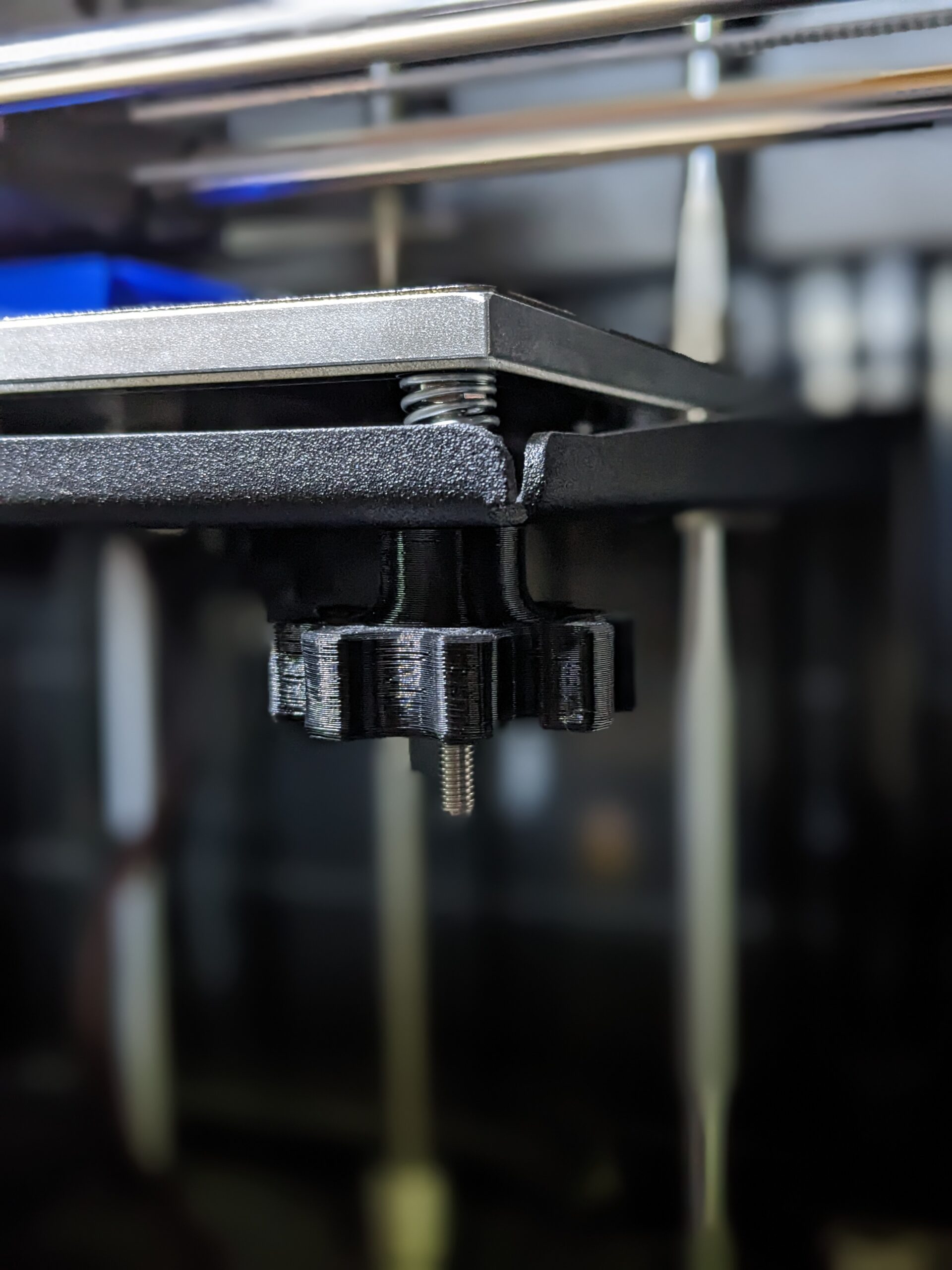
Bed Leveling
Automatisches Leveling gibt es nicht. Das geführte Leveling-Programm im Druckmenü funktioniert problemlos, die eigentlichen Muttern auch. Was nervt: die Sicherung mit einer zusätzlichen Flügelmutter. Man stellt alles perfekt ein, sichert die Muttern und dabei verschiebt sich der Abstand zur Nozzle wieder. Vielleicht habe ich zu dicke Finger.
Zusammen mit dem All-Metal Hotend bin ich auf eine Nozzle von Brozzl gewechselt. Beschichtetes Kupfer statt Messing: besserer Wärmeleitwert und etwas härter. Bei Messing und erst recht bei Stahl muss man die Temperatur 5-10 Grad höher setzen. Kupfer macht das überflüssig.
Verschiedene Geschirrspüler haben ein ähnliches Problem mit der Dichtung am Pumpentopf. Die Hersteller entwickeln solche Teile nicht für jedes Modell neu, ähnlich wie bei Autoherstellern greifen sie auf Grundkomponenten zurück. Tritt bei einem dieser Teile ein Problem auf, betrifft es eine Vielzahl an Geräten. Nicht nur meine von Bosch, sondern auch baugleiche von Siemens, Neff und Constructa.
Nach ein paar Jahren im Einsatz verzieht sich der Pumpentopf offenbar leicht. Gerade genug, um ein wenig Wasser zu verlieren, nicht so viel, dass die Küche überschwemmt wird, aber genug, damit der Sensor anspricht und die Maschine mit dem Fehlercode E-15 stoppt. Die Maschine beginnt dann panisch Wasser abzupumpen und hört damit nicht mehr auf.
Reparatur
Die Reparatur ist einfach. Es gibt einen speziellen Reparatursatz für den Pumpentopf, der eine zusätzliche Dichtung enthält. Diese sorgt dafür, dass der Pumpentopf auch dann dicht bleibt, wenn er sich durch die Hitze leicht verzieht. Wenn man nicht gerade zwei linke Hände hat, ist die Reparatur in etwa 15 Minuten erledigt.
Ob die eigene Maschine bereits über diese Dichtung verfügt, erkennt man an einem kleinen Aufkleber links in der Tür, auf dem ein großes „R“ zu sehen ist:
Reparatur einer Spülmaschine, mal was anderes, oder? Fragen? Einfach melden.
Den MikroTik CRS305-1G-4S+IN habe ich Ende 2020 in meinem Arbeitszimmer in Betrieb genommen. Workstation, Storage, Hauptswitch und Windows-PC hängen seitdem an seinen vier SFP+ Ports. Fünf Jahre später läuft das Teil immer noch ohne Ausfall und ich denke es ist Zeit für ein ehrliches Update.
Damals lag der Preis bei knapp über 100 Euro, aktuell zeigt mir Amazon 131,62 Euro an. Klingt nach Inflation, ist für einen managebaren 4-Port 10-Gbit-Switch trotzdem immer noch ein Witz.
Was bekommt man fürs Geld?
An der Hardware hat sich seit dem Erstkauf nichts geändert: Vier SFP+ Ports mit 10 Gbit/s, dazu ein Gigabit-Port für Out-of-Band-Management. Komplett lüfterlos, das Metallgehäuse dient als Kühlkörper. Stromversorgung wahlweise per Steckernetzteil, über den zweiten Netzteil-Anschluss redundant oder per PoE-In über den Management-Port. Wer es ernst meint mit Hochverfügbarkeit, packt drei verschiedene Quellen drauf.
Auf der Unterseite sind Bohrungen für die Wandmontage. Bei mir hängt der Switch seit Jahren an genau dieser Stelle.
RouterOS, jetzt in Version 7
Auf dem Gerät läuft echtes RouterOS, kein abgespecktes SwitchOS-Light. Vor ein paar Jahren bin ich von Version 6 auf 7 umgestiegen, der Sprung lief schmerzfreier als befürchtet. Container-Support, eine neue Routing-Engine, in-kernel WireGuard, ROSE-storage. Für den CRS305 in reiner Switch-Funktion ist das meiste davon Overkill, aber der gleiche Software-Stack läuft auf allen MikroTik-Geräten und das einmal gelernte Wissen ist übertragbar.
Wer den Switch wirklich nur als Switch braucht und das volle Routing-Featureset nicht will, kann alternativ SwOS einspielen. Ich bleibe bei RouterOS, weil ich VLANs, VRRP und gelegentlich mal eine kleine Bridge mit eigenen Regeln nutze.
Härtung: das was 2021 noch keiner gesagt hat
In den letzten Jahren ist MikroTik mehrfach unangenehm aufgefallen. Botnetze auf nicht aktualisierten RouterOS-Geräten (Mēris, TrickBot, VPNFilter), mehrere Webfig-Authentifizierungs-Bypässe, dazu der Klassiker: Default-User „admin“ ohne Passwort. Wer so ein Gerät ohne Härtung ans Internet hängt oder auch nur ohne Trennung ins LAN, hat sich selbst beschenkt.
Mein Standardvorgehen direkt nach dem Auspacken sieht ungefähr so aus:
/user add name=adminneu group=full password=...
/user remove admin
/ip service disable telnet,ftp,www,api,api-ssl
/ip service set winbox address=192.168.X.0/24
/ip service set ssh address=192.168.X.0/24
/system clock set time-zone-name=Europe/Berlin
/system ntp client set enabled=yes servers=pool.ntp.org
/system package update check-for-updates
/system routerboard upgrade
Webfig und API mögen bequem sein, ich brauche beides nicht. Telnet und FTP haben auf einem Gerät von 2026 nichts mehr verloren. Wer trotzdem das Webinterface nutzen will, sollte zumindest auf HTTPS umstellen und die Zugriffe auf das Management-Subnetz beschränken.
Auto-Update gibt es bei MikroTik leider noch immer nicht out-of-the-box. Ich habe mir einen kleinen Cron-Job gebaut, der einmal im Monat anpingt ob ein Update da ist. Manuell einspielen muss ich es dann selbst, weil mir bei einem zentralen Netzwerkgerät ein automatisches Reboot mitten in der Nacht zu heikel ist.
SFP+ Module und DAC-Kabel
MikroTik ist da angenehm tolerant: vendor-locked Module von Cisco, Juniper oder HPE fliegen in der Regel ohne Murren rein. In meinen vier Ports stecken aktuell zwei FS.com-Module mit LWL, ein generisches Kupfer-DAC zur Workstation und ein 10GBASE-T-Adapter ans Storage. Alles funktioniert, kein Kabel oder Modul zickt.
Vorsicht bei 10GBASE-T-Adaptern: die werden warm. Sehr warm. Bei zwei oder mehr Stück im engen Gehäuse kann der Switch im Sommer am thermischen Limit kratzen. Wer kann, sollte LWL oder DAC bevorzugen, das ist effizienter und kühler. DACs sparen außerdem die Modul-Kosten und bringen Latenzen, die mit aktiven Modulen schlicht nicht zu erreichen sind.
Stromverbrauch
Bei mir liegt der Verbrauch im Mittel zwischen 8 und 12 Watt, je nach Bestückung. Mit zwei 10GBASE-T-Adaptern kann es Richtung 14 bis 16 Watt gehen. Für einen 24/7 laufenden Switch ist das vertretbar, in Zeiten von Stromrechnungen die jedes Jahr neue Höchststände erreichen sollte man es zumindest wissen.
Markt 2026: Alternativen
2021 war der CRS305 in seiner Preisklasse fast konkurrenzlos. 2026 sieht das anders aus. Ein paar Optionen, die ich heute mit auf die Liste setzen würde:
MikroTik CRS309-1G-8S+IN: Doppelte Portzahl, gleicher Aufbau, etwa 250 bis 300 Euro. Wenn vier Ports knapp werden, der logische Schritt nach oben.
MikroTik CRS310-1G-5S-4S+IN: Mischmasch aus 1G/2.5G und 4× SFP+, brauchbar wenn das eigene Netz nicht komplett auf 10G migriert ist.
TP-Link TL-SX3008F: 8× SFP+ JetStream-Smart-Switch, kein RouterOS aber gepflegtes Webinterface, etwa 250 Euro. Für reines Switchen oft entspannter als RouterOS.
QNAP QSW-M408S: 4× SFP+ plus 4× 1G, simples Web-UI, knapp 280 Euro. Gut für Leute, die kein RouterOS lernen wollen.
Ubiquiti USW-Aggregation: 8× SFP+ mit Web-Controller, etwa 280 Euro. Wer schon im UniFi-Ökosystem unterwegs ist, will sowieso nichts anderes.
Für den absoluten Einstieg in 10G zuhause, mit kleinem Budget und der Bereitschaft sich kurz mit RouterOS zu beschäftigen, ist der CRS305 weiterhin der beste Deal. Wer mehr Ports braucht oder das Routing-Featureset gar nicht erst anfassen will, sollte einen der oben genannten in die engere Wahl nehmen.
Fazit nach 5 Jahren
Das Gerät ist seit 2021 ohne einen einzigen Ausfall durchgelaufen, hat zwei Wohnungswechsel und mehrere RouterOS-Major-Updates überlebt. Bei aktuell 131,62 Euro auf Amazon oder direkt von MikroTik bleibt es eine klare Empfehlung. Mit der Einschränkung, dass man die paar Minuten in Härtung investieren sollte, sonst wird aus dem schönen kleinen Switch schnell ein Botnet-Knoten.
Ich mache ja eher selten Werbung für ein Produkt, aber dieser Switch hat sich nach fünf Jahren als die beste Empfehlung herausgestellt, die ich in dieser Preisklasse jemals geben konnte.
Meine Geschirrspülmaschine hat mir heute einige Nerven gekostet. Mit einem fröhlichen E-21 im Display war Schluss mit Spülen. Der Fehlercode deutet darauf hin, dass etwas mit der Umwälzpumpe nicht stimmt. Die Maschine ist knapp sechs Jahre alt und läuft hier täglich für einen Vier-Personen-Haushalt, sie hat selten Langeweile. Die Maschine ist baugleich zu Siemens, Neff und Constructa.
Mein erster Schritt war ein Anruf beim nächstgelegenen Serviceanbieter. Dieser sagte mir, dass er die Maschine in einer Woche abholen und bei sich überprüfen könnte. In der Regel wird dann die Umwälzpumpe ausgetauscht, und ich bekäme die Maschine nach zwei bis drei Tagen zurück. Für 200 bis 300 € mehr könnte er mir aber direkt eine neue Maschine liefern und die alte entsorgen. Bei einer so alten Maschine… Warum werden heutzutage nur noch Teile ausgetauscht? Warum soll immer alles neu sein? Warum repariert niemand mehr?
Reparatur
Eine kurze Suche brachte mir eine Explosionszeichnung meiner Spülmaschine. Die Konstruktion sieht sehr überschaubar aus. Letztlich fand ich in der Umwälzpumpe ein Stück Plastikverpackung. Die Pumpe ließ sich fast vollständig zerlegen und reinigen. Jetzt läuft die Maschine wieder, ganz ohne Fehler, insgesamt 40 Minuten Arbeit.
Nachtrag: Pumpe doch kaputt
Einige Monate später hat die Pumpe dann doch aufgegeben. Anscheinend hat das Plastikteil eine Unwucht verursacht, die zum endgültigen Ausfall geführt hat. Falls die Pumpe tatsächlich defekt ist, lässt sich das Ersatzteil über Amazon bestellen. Der Austausch ist einfach, und alles Notwendige ist dabei.
Die gleiche Maschine hatte später auch den Fehler E-15, eine verzogene Dichtung am Pumpentopf. Fragen? Einfach melden.